|
|
|
发布时间: 2021-04-25 |
清洁安全发电 |
|
|
|

|
收稿日期: 2021-01-06
基金项目: 国家自然科学基金(51405286);上海市重点实验室电站自动化技术实验室项目(13DZ2273800)
中图法分类号: U463.633;TP242
文献标识码: A
文章编号: 2096-8299(2021)02-0109-06
|
摘要
为提高燃料电池混合动力系统功率输出的动态特性,并提高其经济性,在基于DC/DC变换器微分平坦控制的基础上提出了基于高效率功率跟随的混合能量管理策略,建立了包括燃料电池、锂电池、DC/DC变换器和负载等部件的数学模型,并进行了仿真实验。研究结果表明:基于微分平坦控制的DC/DC变换器控制方法能够改善系统的动态响应,修正后的电池的荷电状态(SOC)维持且接近期望SOC值;燃料电池的高效率功率跟随控制策略可以实现系统功率的合理分配,使得混合动力系统可以更安全、高效地运行。
关键词
燃料电池; 能量管理; 荷电状态; 高效率功率跟随控制; 微分平坦控制
Abstract
In order to improve the dynamic characteristics of power output of fuel cell hybrid power system and improve its economy, based on the differential flattening control of DC/DC converter, the hybrid energy management strategy based on high efficiency power following is proposed.The mathematical models of fuel cell, lithium battery, DC/DC converter and load are established and simulation test is done.The results show that: the DC/DC converter control method based on differential flattening control can improve the dynamic response of the system, the state of charge of the modified battery is maintained and close to the expected SOC value; the high efficiency power following control strategy of fuel cell can realize the reasonable distribution of system power, and the hybrid power system can operate more safely and efficiently.
Key words
fuel cell; energy management; state of charge; high efficiency power following control; differential flattening control
燃料电池具有零排放、能量转换效率高、燃料来源多样并可灵活取自于可再生能源等优势[1], 被视为替代现有化石能源的新型可再生能源。但是也存在着以下不足[2], 如燃料电池不能实现能量流的双向流动, 且根据电流变化和电压变化幅度大、输出特性较软, 负载功率波动影响燃料电池的输出效率。基于燃料电池为主能源, 锂电池为辅助能源的混合动力系统能够实现能量流的双向流动, 并具有动态响应快等优点, 因此研究燃料电池和锂电池组成的混合动力系统的能量管理具有重要的意义。
燃料电池混合动力系统的能量管理是将负载正常运行所需要的功率合理地分配到燃料电池和锂电池, 既满足负载要求, 又能保证2个电池组工作在有效工作区间内。
现有的燃料电池混合动力系统能量管理控制策略主要为开关控制策略和功率跟随控制策略。开关控制策略比较简单, 仅以锂电池的荷电状态(State of Charge, SOC)为判断燃料电池工作的唯一条件, 但在锂电池的SOC值处在下边界附近且高于最小SOC值时, 燃料电池不工作, 负载仅由锂电池提供能量, 若此刻负载突然增大, 低SOC值的锂电池难以满足负载的瞬时大功率需求, 降低了燃料电池负载系统的动态响应能力。此外, 当锂电池处在SOC边界值附近时, 会高频率充放电, 这样不利于锂电池的长期使用。因此, 采用功率跟随控制策略, 主要目标是保证锂电池的SOC值维持在设定的期望值。当SOC值小于期望值时, 燃料电池一方面给负载提供足够的功率, 另一方面给锂电池充电使其SOC值接近期望值; 当锂电池SOC值大于期望值时, 锂电池向外放电使其下降至理想SOC值, 并通过功率计算确定燃料电池的输出功率, 始终使锂电池处于最佳的SOC状态。但这种功率跟随控制策略容易造成燃料电池的频繁开关。
20世纪90年代, FLIESS M等学者[3]提出了非线性系统的微分平坦理论, 本质是输出反馈线性化。它可以实现对非线性系统状态轨迹的完全描述, 能够提供良好的系统动态特性, 近年来得到了跨学科多领域的高度关注。国内外有很多将微分平坦控制应用于实时轨迹跟踪中的研究, 如机器人的轨迹规划[4-5]、飞行器轨迹规划[6]等; 也有一些将其应用到控制领域中, 如文献[7]研究了微分平坦控制理论在自动发电控制(Automatic Generation Control, AGC)系统中的动态特性。
基于以上分析, 本文提出了一种基于高效率功率跟随的混合能量管理策略, 使燃料电池运行在效率较高的范围内, 保证锂电池运行在理想的SOC值范围内, 降低内阻消耗的能量, 提高整体系统的经济性; 同时将微分平坦控制与改进的功率跟随控制相结合, 提高动态响应速度。
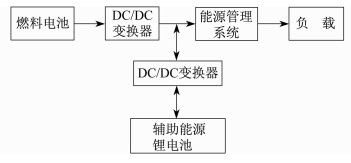
1 燃料电池混合动力系统的主要拓扑结构
2 燃料电池混合动力系统的控制策略
燃料电池混合动力系统控制框如图 2所示。其中, Preqload为负载参考功率, Pfcref为燃料电池参考输出功率, Pfc为燃料电池输出功率, D为占空比。
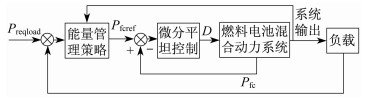

系统为双闭环控制: 外环控制实现混合动力系统的能量管理, 保证燃料电池的输出功率在合理的高效率运行范围内, 同时依靠合理的能量管理策略使锂电池的SOC值保持在理想的范围内, 避免锂电池的过度充放电, 减少内阻消耗的能量, 提高系统的经济性; 内环控制实现燃料电池输出功率跟随控制, 通过控制DC/DC变换器, 实现对燃料电池输出功率的控制。
对基于最大输出功率为500 W的燃料电池系统进行了传统的功率跟随控制实验。图 3为效率随其输出功率的变化曲线。由图 3可知: 电池效率在最大工作功率的10%以前随功率的增加而快速增大; 在最大功率的10%~80%之间, 效率受输出功率的影响较小; 当输出功率超过最大输出功率的80%时, 燃料电池的效率下降明显。燃料电池的频繁开关会破环电堆的正常工作, 进而降低燃料电池的性能和工作寿命, 且燃料电池自身正常运行时也需要消耗功率[9]。因此, 本文在传统功率跟随控制上加以改进, 为避免燃料电池的频繁开关且提高燃料电池的利用效率, 控制燃料电池的输出功率维持在最大功率的20%~80%之间。
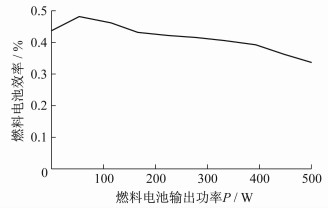
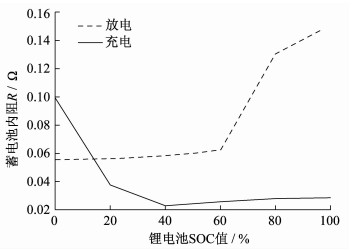
图 4为锂电池内阻跟随SOC值的变化曲线。在充电阶段, 当SOC < 60%时, 锂电池的内阻较小且增大缓慢, 当SOC>60%时, 锂电池内阻急剧增大; 在放电阶段, 当SOC < 40%时, 锂电池内阻较大且急剧下降, 当SOC>40%时, 锂电池内阻缓慢增大, 但阻值较小; 当SOC在[40%, 60%]区间内, 锂电池的内阻较小[10]。因此, 为满足驱动系统瞬时大功率需求, 保证锂电池瞬时大功率放电, 设定锂电池SOC值的正常运行范围为[60%, 80%]。
3 基于高效率功率跟随的能量管理策略
燃料电池功率计算与以下3个方面有关: 系统的需求功率, 即根据系统需求功率大小判断出燃料电池是否要放电, 若系统功率需求为负, 则为回馈制动, 燃料电池不需要放电; 锂电池的SOC值, 根据SOC值的大小判断是否需要燃料电池增大输出功率对其进行充放电; 燃料电池输出功率的上下限值, 为防止其输出电流过大引起电压大幅度下降对电堆造成破坏, 需要设置燃料电池输出功率的上下限值, 保护燃料电池并提高其功率输出的经济性。
计算燃料电池输出负载功率Pfcbyload, 首先要满足负载需求功率Pload, 即
| $ P_{\text {fcbyload }}=\left\{\begin{array}{ll} P_{\text {load }}, & P_{\text {fcbyload }}>0 \\ 0, & P_{\text {fcbyload }}<0 \end{array}\right. $ | (1) |
其次, 要根据锂电池的SOC值ηSOC修正燃料电池的输出功率, 使ηSOC保持在理想的SOC*值ηSOC*。基于SOC值修正的燃料电池增发功率为
| $ P_{\mathrm{fc}-\mathrm{soc}}=P_{\mathrm{fc}-\mathrm{chg}} \frac{\eta_{\mathrm{soc}}-\eta_{\mathrm{soC}}^{*}}{\Delta \eta_{\mathrm{SOC}}} $ | (2) |
| $ \eta_{\mathrm{SOC}}^{*}=0.5\left(\eta_{\mathrm{SOC}_{\max }}+\eta_{\mathrm{SOC}_{\min }}\right) $ | (3) |
| $ \Delta \eta_{\mathrm{SOC}}=0.5\left(\eta_{\mathrm{SOC}_{\max }}-\eta_{\mathrm{SOC}_{\min }}\right) $ | (4) |
式中: Pfc-chg——燃料电池充电功率;
ηSOCmax, ηSOCmin——锂电池SOC值的最大值和最小值。
当SOC值低于理想值时, 燃料电池增发功率, 给锂电池充电; 当SOC值高于理想值时, 燃料电池减发功率, 锂电池放电。这两种运行状态都使锂电池的SOC值向理想值靠近, 从而使锂电池工作在可充可放的状态, 在负载功率需求突变的状态下, 锂电池可以快速响应, 从而减少燃料电池的频繁切换, 减少氢气消耗, 提高输出功率的经济性。
4 DC/DC变换器控制
4.1 基于DC/DC变换器的微分平坦控制电路模型
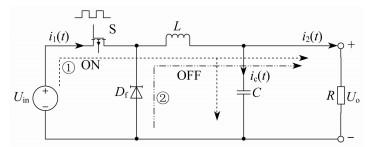
微分平坦控制的显著特点是系统的状态量和输入控制量可以由系统的输出量及输出量的有限次微分的数学关系式直接表示, 且不需要求解与系统状态量和输出控制量有关的微分方程。建立微分平坦控制电路, 需要首先验证被控系统的平坦性。图 5为Buck DC/DC变换器的电路模型。α表示Buck变换器的导通占空比, T为周期, Uo为系统输出电压。在0至αT期间内, 开关S导通, 电流流动方向如虚线①所示, 在αT至T期间内, 开关S断开, 电流流动方向如虚线②所示。选择燃料电池输出功率Pfc为系统的输出变量yp, 燃料电池输出电流i1为系统的状态变量xp。
根据变换器状态方程得到其状态空间平均方程为
| $ \left\{\begin{array}{c} \dot{x}_{\mathrm{p}}=\frac{\mathrm{d} i_{1}}{\mathrm{~d} t}=\frac{1}{L}\left(\alpha U_{\mathrm{fc}}-U_{\mathrm{o}}\right) \\ y_{\mathrm{p}}=U_{\mathrm{in}} \cdot x_{\mathrm{p}} \end{array}\right. $ | (5) |
式中: Ufc——燃料电池输出电压。
系统输出电压Uo对应的变化率为
| $ \frac{\mathrm{d} U_{\mathrm{o}}}{\mathrm{d} t}=\frac{1}{C}\left[\left(i_{1}-\left(i_{\mathrm{req}}-i_{\mathrm{b}}\right)\right]+\frac{\alpha}{C} U_{\mathrm{in}}\right. $ | (6) |
可得
| $ x_{\mathrm{p}}=i_{\mathrm{fc}}=\frac{P_{\mathrm{fc}}}{U_{\mathrm{fc}}}=\frac{y_{\mathrm{p}}}{U_{\mathrm{fc}}}=\phi\left(y_{\mathrm{p}}\right) $ | (7) |
式中: ireq——燃料电池输出电流;
ib——电感电流;
ifc——燃料电池输出电流。
在DC/DC变换器中, 电流的变化速率很大, 而电压的变化速率很小, 故通常认为电压在一个时刻内是一个常数, 其变化速率可忽略, 可得Pfc的变化率为
| $ \frac{\mathrm{d} P_{\mathrm{fc}}}{\mathrm{d} t}=i_{\mathrm{fc}} \frac{\mathrm{d} U_{\mathrm{fc}}}{\mathrm{d} t}+U_{\mathrm{fc}} \frac{\mathrm{d} i_{\mathrm{fc}}}{\mathrm{d} t} \approx U_{\mathrm{fc}} \frac{\mathrm{d} i_{\mathrm{fc}}}{\mathrm{d} t} $ | (8) |
联立公式可得
| $ u=\alpha=\frac{1}{U_{\mathrm{fc}}}\left(\frac{1}{U_{\mathrm{fc}}} \dot{y}_{\mathrm{p}}+U_{\mathrm{o}}\right)=\varphi\left(y_{\mathrm{p}}, \dot{y}_{\mathrm{p}}\right) $ | (9) |
式中: u——系统的控制变量。
基于以上分析, 可看出DC/DC变换器满足微分平坦控制条件, 因此提出的混合动力系统在以燃料电池输出功率为输出变量时, Buck DC/DC变换器控制系统是一个微分平坦系统。
4.2 Buck DC/DC变换器的微分平坦控制方法
控制系统的参考输入为Pfcref, 根据式(8)和式(3)可以设计出DC/DC变换器的输出反馈线性化控制器, 使Pfc跟随Pfcref, 选取两者的差值为控制量
| $ e=\left(P_{\text {fcref }}-P_{\text {fc }}\right) $ | (10) |
可得到线性化后的新控制变量θ与输出变量y的关系为
| $ y=\int \theta \mathrm{d} t $ | (11) |
基于PID控制的优越性, 采用PID控制方法设计θ的计算公式为
| $ \begin{array}{l} \theta=k_{\mathrm{P}}\left(y-y_{\mathrm{ref}}\right)+k_{\mathrm{I}} \int_{0}^{t}\left(y-y_{\mathrm{ref}}\right) \mathrm{d} \tau+ \\ \ \ \ \ \ \ \ k_{\mathrm{D}} \frac{\mathrm{d}\left(y-y_{\mathrm{ref}}\right)}{\mathrm{d} t} \end{array} $ | (12) |
式中: kP, kI, kD——比例、积分、微分控制系数;
yref——参考输出。
为使燃料电池输出功率跟随参考输出功率, 要求误差e→0。
为了进一步验证微分平坦PID控制系统可以实现快速响应及稳定性, 进行了仿真实验。
5 实验结果及分析
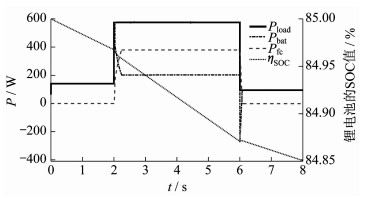
为了验证所涉及的功率跟随能量管理策略的有效性, 进行了相关验证。锂电池SOC初始值分别为35%, 60%, 85%, 分别代表了锂电池在充放电阈值外及充放电阈值之间的3种情况。设定燃料电池最小输出功率Pfcmin=100 W, 锂电池的最大输出功率Pbatcmax=200 W, 锂电池转换器的最大输出功率Pbatdcmax=150 W, 以可变电阻表示负载需求功率的变化。Pload, Pfc, Pbat, ηSOC分别为负载需求功率、燃料电池输出功率、锂电池输出功率、锂电池SOC值。
图 6为SOC初始值为60%(即ηSOC=ηSOC*)时, 混合动力系统的功率分配及锂电池的SOC值变化曲线。
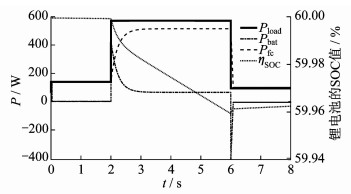
由图 6可看出: 在启动阶段, 锂电池快速放电, 以满足负载功率; 燃料电池启动后, 由于负载需求功率在燃料电池的放电允许范围内, 因此燃料电池单独供电; 在t=2 s时, 负载需求功率增大, 燃料电池单独供电无法满足负载功率需求, 此刻锂电池启动与燃料电池共同向负载供电, 锂电池的SOC值迅速下降; 在t=6 s时, 负载需求功率减小至低于100 W, 此时锂电池的SOC值稍低于理想值, 根据最小功率跟随控制策略, 当锂电池的SOC值在[40%, 80%], 燃料电池保持上一时刻工作状态, 因此6 s后, 燃料电池工作在最小输出功率状态, 既满足了负载功率需求, 也向锂电池缓慢充电, 避免了燃料电池的频繁充放电, 提高了混合动力系统的经济性。
图 7为SOC初始值为35%(即ηSOC<η*SOCmin)时, 混合动力系统的功率分配及锂电池的SOC值变化曲线。
由图 7可以看出: 在启动阶段锂电池快速放电, 以满足负载功率; 燃料电池启动后, 因为ηSOC<η*SOCmin, 燃料电池根据锂电池的SOC值修正输出功率, 向负载放电的同时给锂电池充电, 锂电池的SOC值迅速增大; 在t=2 s时, 负载需求功率增大, 燃料电池单独供电无法满足负载功率需求, 此刻锂电池与燃料电池共同向负载供电, 锂电池的SOC值迅速下降; 在t=6 s时, 负载需求功率减小, 此时锂电池的SOC值仍小于35%, 因此燃料电池根据锂电池的SOC值修正输出功率, 既向负载放电, 同时也给锂电池充电, 为锂电池的下次工作做好准备。
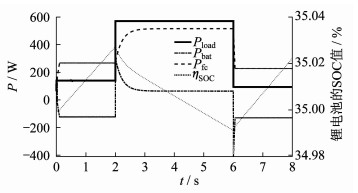
图 8为SOC初始值为85%(即ηSOC>η*SOCmax)时, 混合动力系统的功率分配以及锂电池的SOC值变化曲线。
由图 8可以看出: 在启动阶段, 负载需求功率低于锂电池最大放电功率, 锂电池单独放电满足负载功率; 在t=2 s时, 负载需求功率增大, 燃料电池启动, 锂电池继续放电, 并以最大放电功率与燃料电池共同向负载供电, 锂电池的SOC值迅速下降; 在t=6 s时, 负载需求功率减小, 此时锂电池的SOC值仍大于80%, 且负载需求功率低于燃料电池最小输出功率, 因此燃料电池停止工作, 锂电池单独为负载提供需求功率。
通过上述实验, 验证了基于高效率功率跟随的能量管理控制策略, 在满足负载需求功率的前提下, 能够避免燃料电池频繁开关, 并使燃料电池放电功率始终处在较高效率区间; 且锂电池的SOC值不断地向理想值靠近, 能够工作在内阻相对较小的区间, 提高了混合动力系统的经济性, 保护了燃料电池。
6 结语
为提高燃料电池混合动力系统功率输出的动态特性及经济性, 本文提出了基于高效率功率跟随的混合能量管理策略。研究结果表明: 在该控制策略下, 燃料电池始终工作在高效率的运行状态; 避免了频繁开关对电堆产生的不良影响, 实现了负载需求能量的合理分配, 使得燃料电池和锂电池都运行在效率较高的范围内, 提高了整体系统的经济性; 基于微分平坦控制的DC/DC变换器控制方法改善了混合动力系统的响应速度, 与提出的高效率功率跟随控制相结合, 使燃料电池混合能量系统更有效安全地运行。
参考文献
-
[1]刘宗巍, 史天泽, 郝瀚, 等. 中国燃料电池汽车发展问题研究[J]. 汽车技术, 2018(1): 1-9.
-
[2]狄艾威. 机器人燃料电池混合电源能量流控制系统设计[D]. 武汉: 武汉理工大学, 2010.
-
[3]FLIESS M, LEVINE J, MANIN P. Flatness and defect of non-linear systems: introductory theory and examples[J]. International Journal of Control, 1995, 61(6): 1327-1361. DOI:10.1080/00207179508921959
-
[4]马欣键. 基于微分平坦的移动平台上轮式移动机器人的轨迹规划研究[D]. 南京: 南京信息工程大学, 2018.
-
[5]侯建国, 陈志梅. 基于微分平坦理论的桥式起重机轨迹规划[J]. 控制工程, 2020, 27(4): 624-628.
-
[6]张润德, 蔡伟伟, 杨乐平. 基于微分平坦的航天器避障轨迹快速规划[D]. 长沙: 国防科学技术大学, 2020.
-
[7]蒲天骄, 张昭, 于汀, 等. 微分平坦理论及其在自动发电控制中的应用[J]. 电力系统及其自动化学报, 2014, 26(12): 21-27. DOI:10.3969/j.issn.1003-8930.2014.12.004
-
[8]WANG B, HU Q, WANG Z. A high-efficiency double DC-DC conversion system for a fuel cell/battery hybrid power propulsion system in long cruising range underwater vehicles[J]. Energy & Fuels, 2020, 34(7): 8872-8883. DOI:10.1021/acs.energyfuels.0c01287
-
[9]雷涛, 闵志豪, 付红杰, 等. 燃料电池无人机混合电源动态平衡能量管理策略[J]. 航空学报, 2020, 41(12): 293-307.
-
[10]吴澈. 燃料电池汽车动力系统匹配及控制策略研究[D]. 太原: 中北大学, 2016.


