|
|
|
发布时间: 2019-02-10 |
|
|
|
|

|
收稿日期: 2018-03-17
中图法分类号: TM771;TM773;TM774
文献标识码: A
文章编号: 1006-4729(2019)01-0053-06
|
摘要
传统的多微源并离网无缝切换多采用无功-电压下垂控制策略, 不能保证无缝切换过程的成功, 且在孤岛运行时存在电压偏移的现象, 影响微电网整体的电能质量。通过研究逆变器直流侧与交流侧电量的关系, 提出了在储能逆变器控制策略中加入直流侧电流控制策略, 消除了电压偏移和误调节的问题, 提高了微电网在运行过程中的电压稳定性。
关键词
微电网; 多微源; 无缝切换; 直流侧电流控制
Abstract
The traditional multi-micro-source parallel-to-off network seamless switching mostly adopts reactive power-voltage droop control strategy, which can not guarantee the success of the seamless switching process, and there is voltage offset in islanding operation, which affects the overall power quality of microgrid.By studying the relationship between the DC side and AC side of the inverter, a DC side current control strategy is put forward to eliminate voltage offset and error regulation, and improve the voltage stability of microgrid in operation.
Key words
micro-grid; multi-micro-source; seamless switching; DC control
目前的电力能源主要来自化石能源, 导致化石能源消耗严重, 储量逐年减少, 能源供应愈发紧张。另外, 燃烧化石能源会产生废气和废物, 导致了严重的环境污染问题。人类在不断寻求新的能源, 希望能够缓解化石能源过度消耗造成的能源紧张和环境污染等问题。因此, 以光能、风能、地热能、生物质能等可再生能源作为一次能源进行发电的分布式发电(Distributed Generation, DG)技术得到了迅速的发展。
随着分布式电源供电在传统大电网中的渗透率不断增加, 在与电力系统配合使用的同时, 也对电力系统造成了一些负面影响。IEEE P1547/D08《关于分布式电源与电力系统互联的标准草案》规定:在电力系统的配电网发生故障时, 分布式电源必须立即断开与大电网的连接。为了提高分布式电源的利用效率, 即更加可靠高效地利用可再生资源, 确保用户的供电质量, 并且尽可能减小分布式电源接入大电网所带来的负面影响, 学者们提出了微电网的概念[1-4], 相关研究也取得了丰硕的成果。
在微电网运行过程中最重要的环节就是逆变器控制, 控制方式主要有主从控制、对等控制和分层控制。其控制过程要满足:保证母线在并网、离网及两种方式转换暂态过程的电能质量; 暂态过程中电压幅值的稳定; 实现微电网与配电网间的无缝转换过程; 实现即插即用。为了达到上述要求, 文献[5]提出了添加电压幅值反馈量作为无功下垂控制的补偿量, 但控制环结构复杂, 增加了补偿系数, 参数选取难度增大。文献[6]提出通过检测直流电压, 动态平移下垂特性曲线, 改变下垂控制平衡工作点, 但对平衡工作点的选取要求较高, 且电压存在稳态误差。文献[7]提出了三折线变斜率下垂控制的改进策略, 但仍不能消除电压存在的稳态误差。
本文在研究储能系统逆变器直流侧与交流侧电量关系的基础上, 提出了在模式转换中加入逆变器直流侧电流的控制策略, 提升了蓄电池应对功率不平衡时的输出特性, 控制环采用对直流侧电流的调节控制, 消除了电压的稳态误差, 避免了下垂控制误调节的问题, 能够保证两种方式有效快速的转换。
1 微电网整体架构
微电网的组成具有多样化的性质, 最简易的光储微电网系统仅需光伏电源和储能模块即可; 较为复杂的微电网系统包含有冷、热、电三联供, 由光伏发电、风力发电、微型燃气轮机以及储能电源等模块组成; 更为复杂的大型微电网内还含有多个小型子微电网。
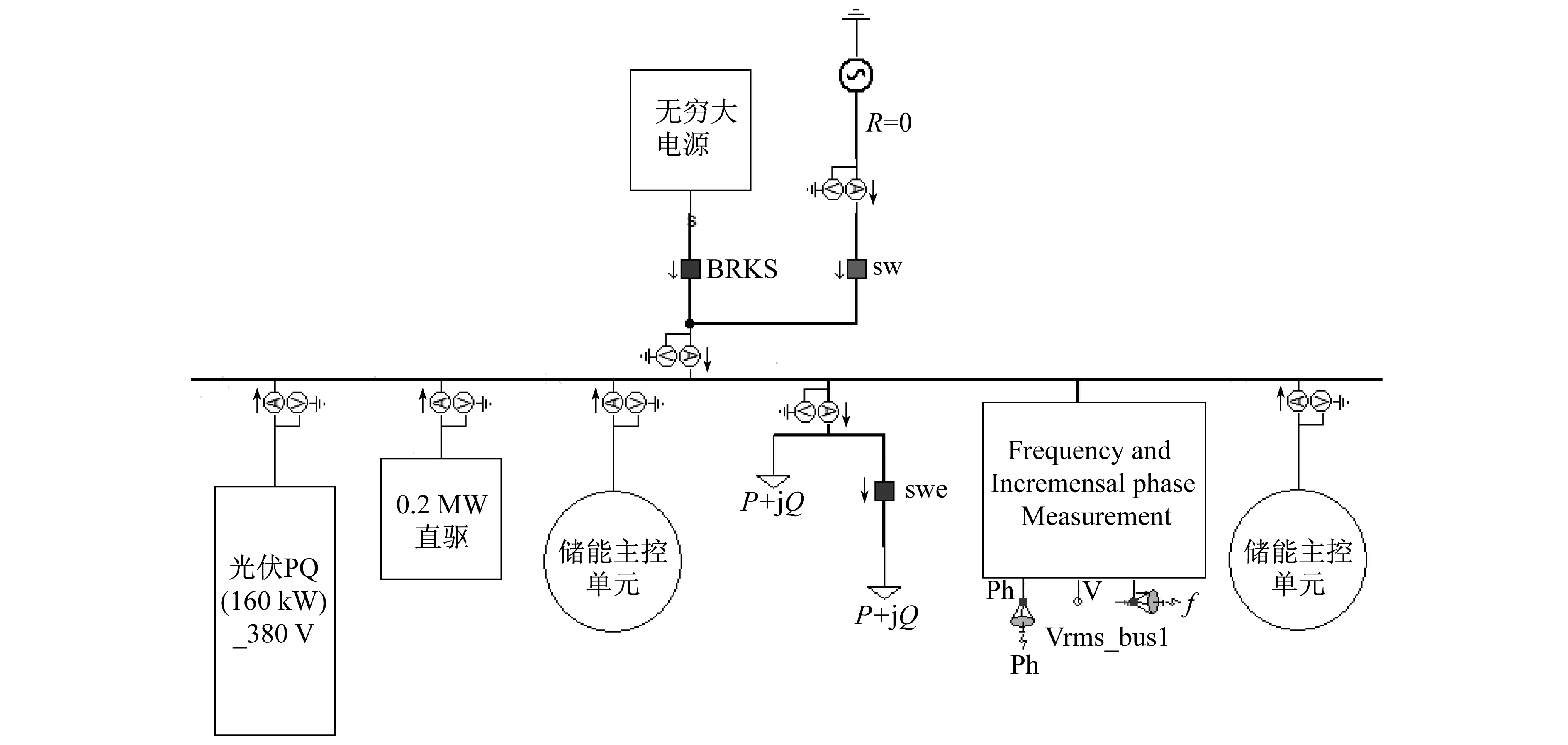
图 1所示的微电网架构, 是由风、光、储、微型燃气轮机及负荷共同连接在公共母线上构成的微电网系统。母线为交流母线, 微源逆变器交流侧和公共接点共同接在交流母线上。负荷侧配置的开关控制及数据采集系统将采集得到的负荷功率和电流数据传送到微电网控制中心, 并接收其发送的控制指令, 控制负荷投切。微源和储能配置的开关控制及数据采集系统将测量得到的电流、功率、电压和频率等数据发送到微电网控制中心, 并接收其发送的运行方式和参数的控制指令。微电网控制中心通过采集微电网的电量信息过程, 完成对微电网的协调控制及优化管理, 原则是:依据配电网和微电网的工作情况, 决定微电网运行方式的转换; 依据配电网中心的调度和电价信息, 调节公共连接点的潮流; 依据负荷特性调整微电网内各单元, 保障微电网输出的电能质量, 满足用户对电能质量的要求; 依据经济最优原则调节微源的输出, 缩减能源消耗。
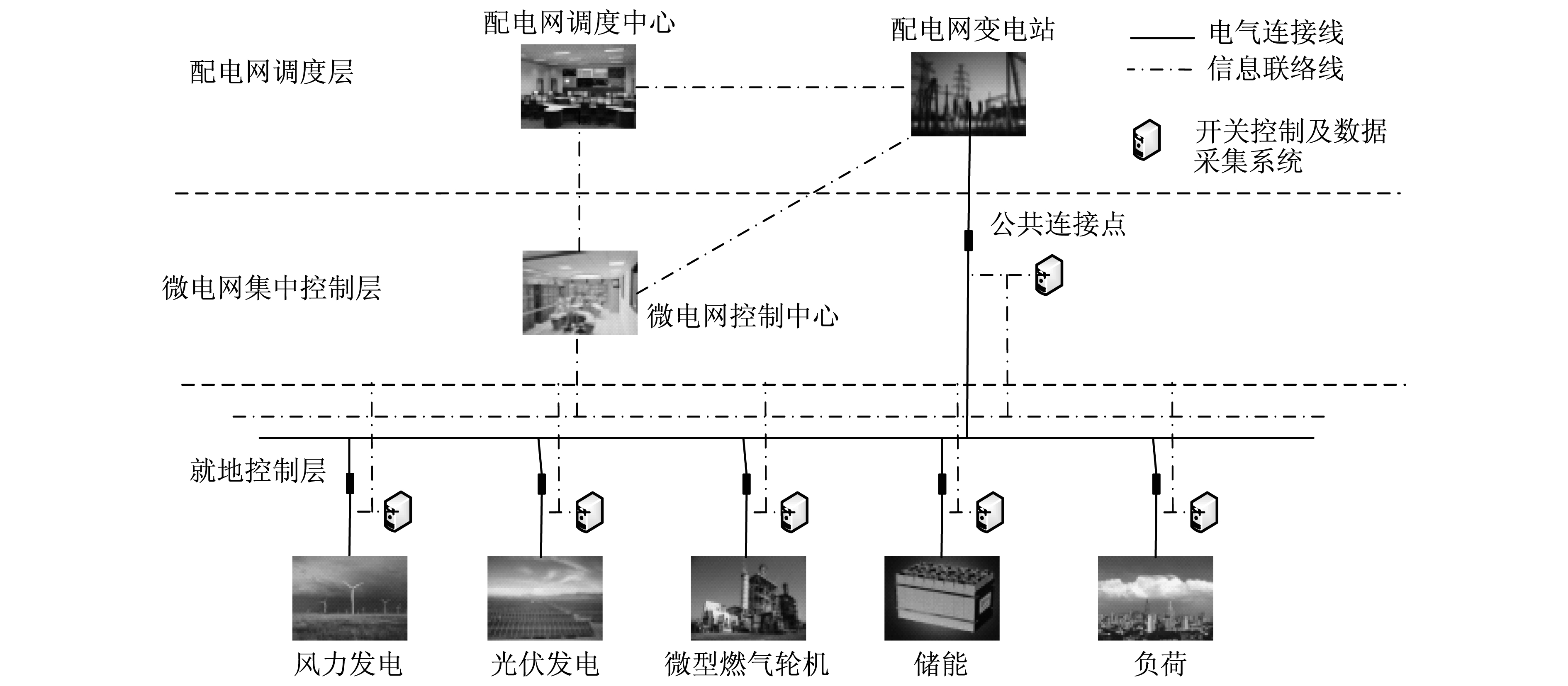

为了满足上述要求, 需要采取有效的控制策略对各微源逆变器进行控制, 保证重要负荷的持续供电。风力发电和光伏发电因其为间歇性能源, 在孤岛运行时不作为母线电压控制。图 1中的微型燃气轮机发电和储能电源共同承担母线电压控制, 是相对主要的电源。为了更好地满足重要用户对电能质量的要求, 重要负荷和主电源应在同一回路中, 在并离网发生的瞬间, 最大程度地保证重要负荷的无缝转换, 主电源功率输出应与重要负荷的容量配置相匹配, 这样才能保证重要负荷和主电源功率能在很短时间内迅速平衡。
2 直流侧电流控制多微源并列运行原理分析及控制环设计
2.1 多微源并列运行原理分析
为了扩大微电网的系统容量, 常采用多个微源并列运行的方法, 组成冗余系统, 提高微电网运行的可靠性。多微源并列等效电路图如图 2所示。
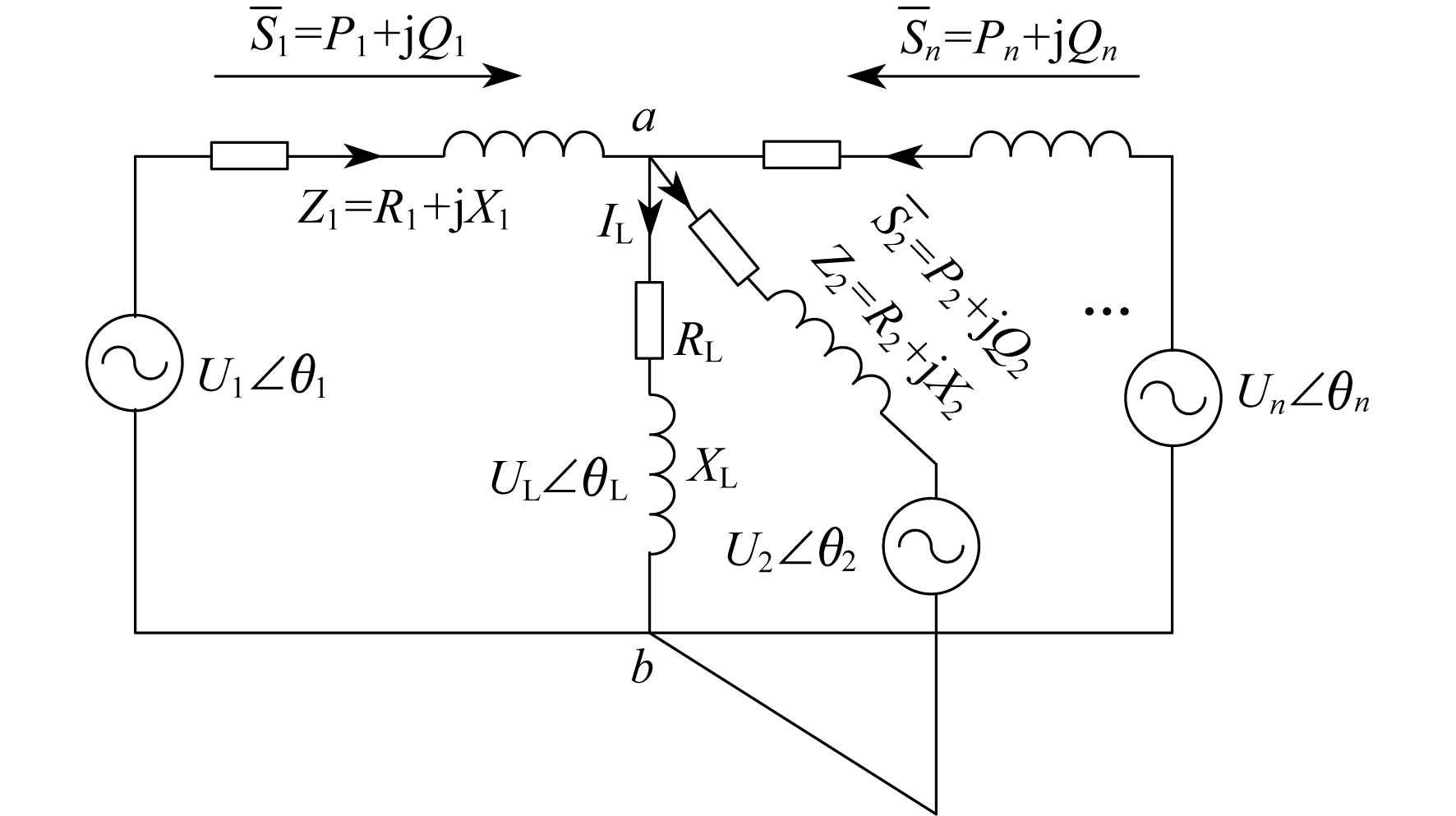
以n台微源并列运行为例, 微源通过逆变器与交流母线连接, 逆变器端口输出的理想三相对称的交流电源U1∠θ1, U2∠θ2, U3∠θ3, …, Un∠θn, 其幅值为逆变器的输出端口的基波电压, 各个逆变器和与之对应的滤波器的阻抗值整体作为各个电压源的等效内阻。逆变器工作时实际是二极管的导通与关断, 二极管导通时逆变器的阻抗值远远小于滤波器的阻抗值。本文在分析微源等效模型时, 忽略逆变器的阻抗值, 只考虑滤波器的阻抗值。n微源通过逆变器输出的功率分别为 输出电流分别为I1, I2, I3, …, In。
输出电流分别为I1, I2, I3, …, In。
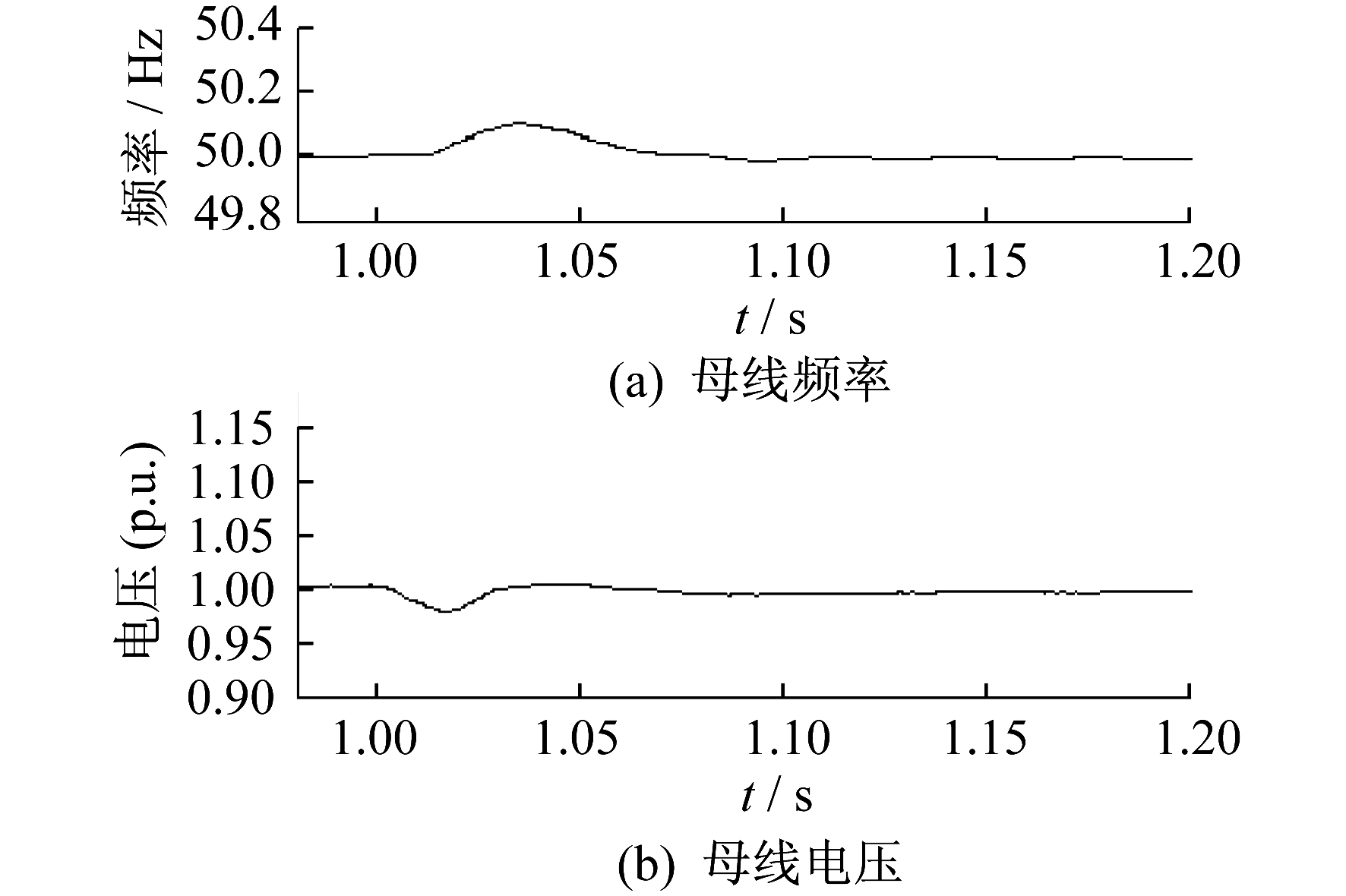
由于在1 s转换时, 有功功率过剩, 无功功率不足, 此时母线频率上升, 母线电压下降, 通过VSC控制使两微源直流侧电流快速稳定到稳态值, 减少了波动过程, 同时缩小了波动幅值, 有效地防止了并离网切换的失败。其中, 频率上升最大值为50.13 Hz, 偏差为0.13 Hz, 电压最小为0.98 p.u., 稳态时电压为0.996 p.u., 偏差为-0.4%, 误差很小, 可以认为实现了微电网的无差控制。两微源可接负载比单微源要多, 但运行时偏差反而更小。由此可见, 由于并联运行时提高了系统的容量, 微电网的可靠性和稳定性得到了提升。
当微电网负载不变, 工作在理想状态下时, 其负载功率不发生变化, 若微电网控制系统分配给第m个微源的负载功率为 则
则 与
与 之间的关系式为
之间的关系式为
| $ \bar{S}_{m \mathrm{g}}=\bar{S}_{m}-\left(\boldsymbol{U}_{m}-\boldsymbol{U}_{\mathrm{L}}\right) \boldsymbol{I}_{\mathrm{L}} $ | (1) |
可知
| $ \begin{aligned} \bar{S}_{m \mathrm{g}}=& \boldsymbol{U}_{\mathrm{L}} \boldsymbol{I}_{m}=U_{\mathrm{L}} I_{m} \cos \varphi_{m}+\\ & \mathrm{j} U_{\mathrm{L}} I_{m} \sin \varphi_{m} \end{aligned} $ | (2) |
功率分配与角度之间的关系为
| $ \tan \varphi_{m}=\frac{Q_{m}}{P_{m}} $ | (3) |
选取UL的相位为参考相位。由于分配的有功功率和无功功率是一定的, 则此时Im的幅值为
| $ I_{m}=\frac{P_{m}}{U_{\mathrm{L}} \cos \varphi_{m}} $ | (4) |
则m微源逆变器输出侧的基波电压为
| $\boldsymbol{U}_{m}=\boldsymbol{I}_{m} Z_{m}+\boldsymbol{U}_{\mathrm{L}}$ | (5) |
求出其幅值和相位为Um和θm。根据文献[12-15]可得
| $\left\{\begin{aligned} i_{\mathrm{d} m}=& \frac{3}{8} m_{m}^{2} u_{\mathrm{d} m} \sqrt{\frac{1+\rho_{m}^{2}-2 \rho_{m} \cos \theta_{m}}{R^{2}+(\omega L)^{2}}}\left[\cos \left(\theta_{m}+\right.\right.\\ &\left.\left.\varphi_{m}\right)-\mathrm{e}^{-\frac{1}{\tau_{m}}} \cos \left(\omega t+\theta_{m}+\varphi_{m}\right)\right] \\ \rho_{m}=& \frac{U_{\mathrm{L}}}{U_{m}}=\frac{2 U_{\mathrm{L}}}{u_{\mathrm{d}}} \\ m_{m} &=\frac{2 U_{m}}{u_{\mathrm{d}}} \end{aligned}\right.$ | (6) |
式中:idm, udm——第m个微源的直流侧输入电流和输入电压;
mm——第m个微源的逆变器PWM的调制系数;
ρ——交流反电势幅度因数;
τm——时间常数;
UL——负载电压幅值;
Um——第m个微源的输出电压幅值;
ud——逆变器输出的电压幅值。
两微源并列在a点和b点, 共同带负荷ZL, 在n个微源的共同作用下, 负载电压为UL∠θL, 负载电流为IL。
2.2 逆变器控制环的设计
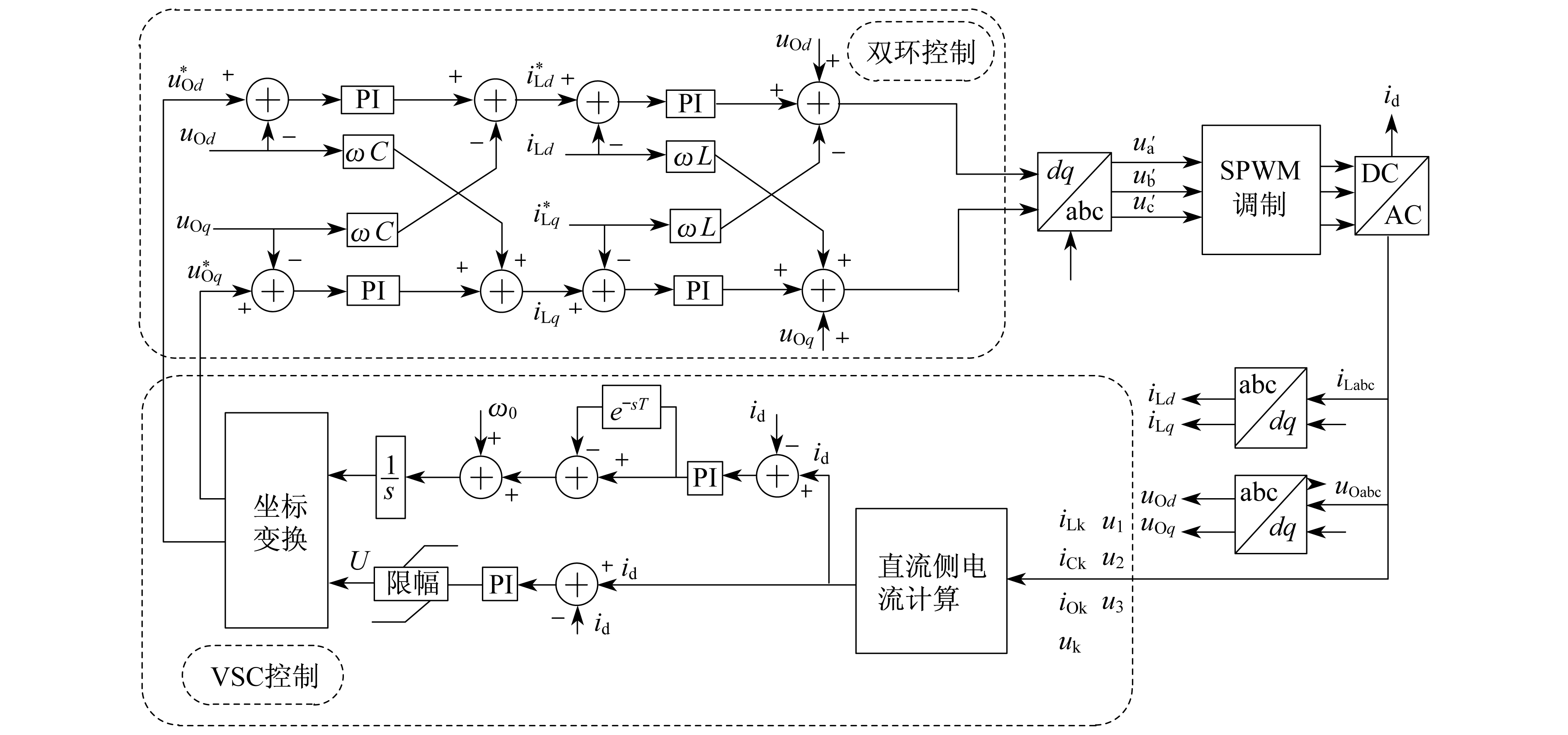
微电网并离网运行功率不平衡时及离网运行负荷发生变动时, 直流侧电流控制环结构如图 3所示。
根据功率暂态波动变化率以及负荷实时功率平衡, 将预设的主逆变器直流暂态电流参考值idref与测量值id进行比较, 并经过PI调节整定值, 以保证限制参考电压U幅度不低于零, 再依据直流电流的PI调节值对 进行修正。比较idref与测量值id, 并经过PI调解整定值, 与此整定值比较可得滞后差值Δω参与频率的控制。
进行修正。比较idref与测量值id, 并经过PI调解整定值, 与此整定值比较可得滞后差值Δω参与频率的控制。
3 多微源并列运行仿真验证
为了验证策略的有效性, 基于PSCAD搭建了微电网仿真模型, 如图 4所示。仿真模型参数如下:光伏电源容量为160 kW, 风力发电电源为200 kW, 两组蓄电池, 每组蓄电池容量为100 Ah, 额定电压为1.8 V, 额定放电率为0.3 C, 负荷功率为(0.72+j0.45)MW, 母线三相电压有效值为0.38 kV。
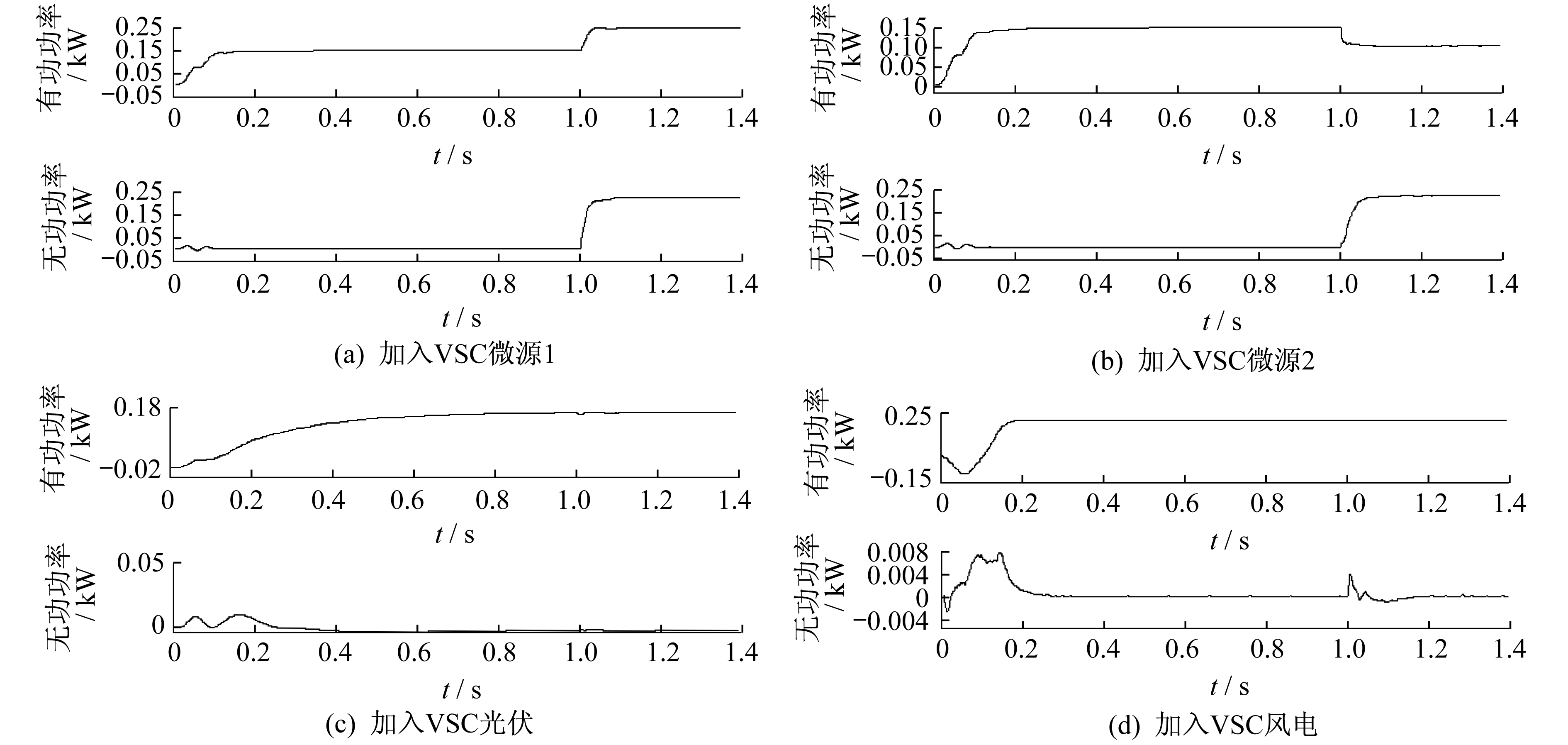
0~1 s内微电网在并网方式仿真工作, 微源和储能电池均用有功无功功率(PQ)控制。在1 s时, 蓄电池逆变器由PQ控制转换成VSC控制模式。仿真进行到1.5 s时, 两微源进行功率分配, 将系统总负荷去掉光伏发电、风力发电的输出后, 剩余功率为(0.36+j0.45)MW, 给微源1分配(0.24+j0.225)MW, 给微源2分配(0.12+j0.225)MW, 仿真结果如下。
在1 s时, 微电网发生工作状态转换, 转换过程中微电网的电压频率如图 5所示。由图 5可知, 0~1 s并网运行时, 系统稳定后, 各分布式电源的输出功率均与给定的PQ值保持一致; 在1 s时, 微电网由并网状态转入离网, 离网运行稳定后, 风力发电、光伏发电仍然按照PQ控制策略给定的输出状态运行, 而微源1和微源2运行在VSC控制策略, 按照功率分配计算其直流侧电流进行控制。通过孤岛稳定运行后的结果可以看出控制策略的有效性。
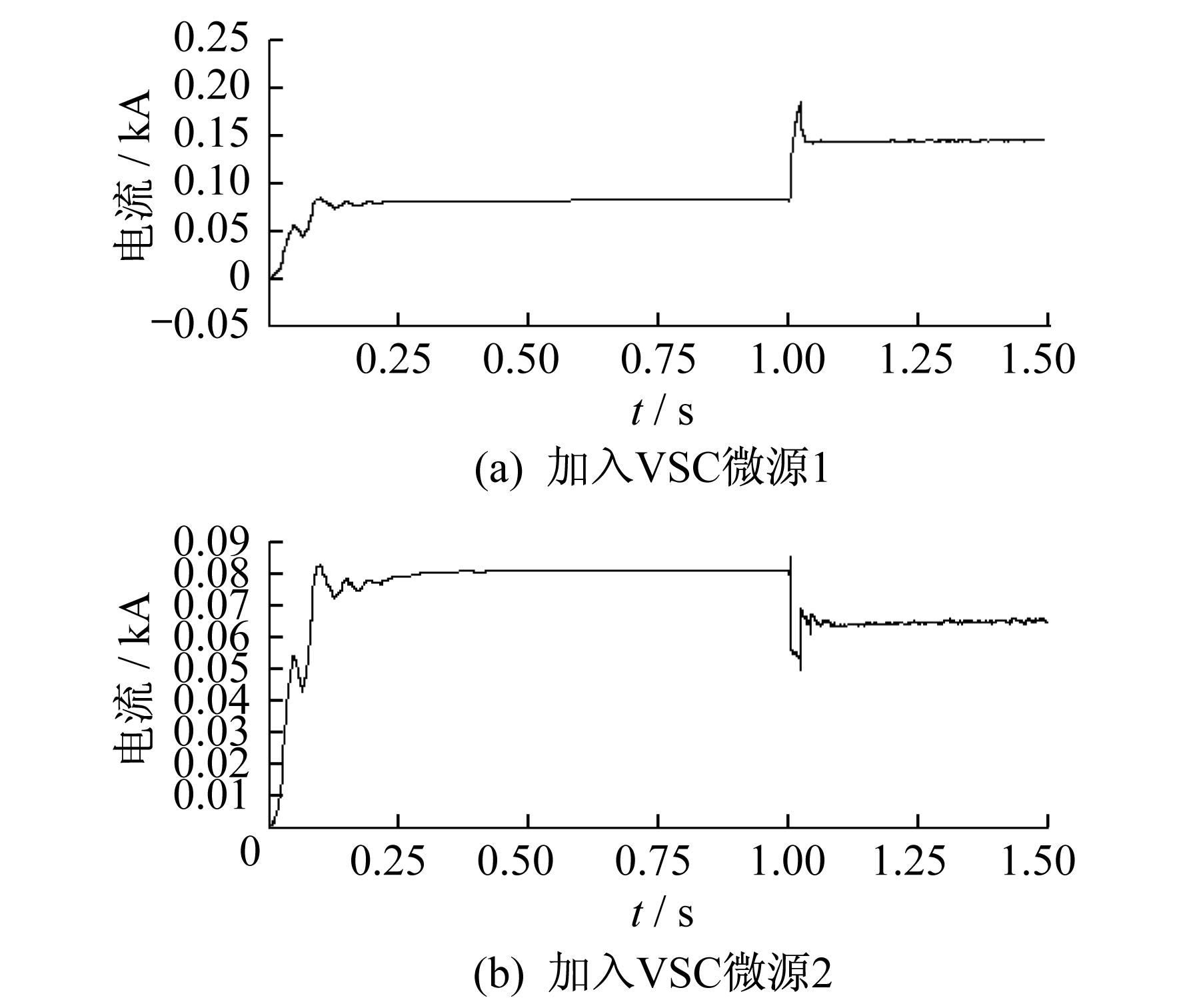
两微源并离网运行时的母线电压和频率如图 6所示。直流侧电流输出如图 7所示。
综合上述各式, 在多微源共同支撑孤岛运行状态下的微电网电压和频率时, 可得各个微源直流侧电流的参考值, 其控制环设计与单个微源孤岛运行时一致。
4 结论
针对主逆变器无功-电压下垂控制存在电压偏移和误调节的问题, 提出了基于直流侧电流的控制策略, 与传统的下垂控制策略相比, 本控制策略的优势如下。
(1) 传统的下垂控制策略与逆变器的容量有关, 而直流侧电流的控制策略在不影响系统性能的条件下, 具有较高的灵活性, 可以根据需求合理地分配微源的输出情况。
(2) 传统的下垂控制策略在控制微电网的电压幅值时, 控制结果存在稳态误差, 这是下垂控制本身的缺陷; 而基于直流侧电流控制策略从原理上是根据逆变器交直流电量的关系计算得到的, 不存在稳态误差。仿真结果证明了本文方法的可行性和有效性。
参考文献
-
[1]新型电网-微电网(Microgrid)研究综述[J]. 电力系统保护与控制, 2007, 35(12): 75-81. DOI:10.7667/j.issn.1674-3415.2007.12.019
-
[2]微电网的研究现状及在我国的应用前景[J]. 电网技术, 2008, 32(16): 27-31.
-
[3]微电网关键技术研究[J]. 电工技术学报, 2014, 29(2): 1-12. DOI:10.3969/j.issn.1000-6753.2014.02.001
-
[4]微电网研究综述[J]. 电力系统自动化, 2007, 31(19): 100-107. DOI:10.3321/j.issn:1000-1026.2007.19.022
-
[5]基于改进下垂控制的微电网运行控制研究[J]. 电力系统保护与控制, 2016(4): 16-21. DOI:10.7667/PSPC20160403
-
[6]一种改进的微电网并联逆变器下垂控制策略[J]. 沈阳工程学院学报(自然科学版), 2016, 12(4): 289-296.
-
[7]无储能风电微网系统的下垂控制策略[J]. 电工技术学报, 2016, 31(18): 169-175. DOI:10.3969/j.issn.1000-6753.2016.18.021
-
[8]交直流混合微电网中储能变流器无缝切换策略[J]. 电力系统自动化, 2016, 40(10): 84-89. DOI:10.7500/AEPS20150604007
-
[9]微电网并网/独立模式自动无缝切换控制策略[J]. 科技与创新, 2014(10): 1-4.
-
[10]CHEN L J, MEI S W. An integrated control and protection system for photovoltaic microgrids[J]. CSEE Journal of Power & Energy Systems, 2015(1): 36-42.
-
[11]MOHAMED A R I, RADWAN A A. Hierarchical control system for robust microgrid operation and seamless mode transfer in active distribution systems[J]. IEEE Transactions on Smart Grid, 2011, 2(2): 352-362. DOI:10.1109/TSG.2011.2136362
-
[12]四象限变流器的一种统一性建模及分析方法研究[J]. 中国电机工程学报, 2004, 24(8): 39-44. DOI:10.3321/j.issn:0258-8013.2004.08.008
-
[13]PWM逆变器的直流侧等效模型研究[J]. 中国电机工程学报, 2007, 27(4): 103-107. DOI:10.3321/j.issn:0258-8013.2007.04.018
-
[14]基于准Z源逆变器的光伏发电系统的双滑模变结构控制[J]. 上海电力学院学报, 2017, 33(5): 459-465.
-
[15]基于电网电压矢量定向控制的三相并网逆变器模糊PI控制策略[J]. 上海电力学院学报, 2017, 33(1): 55-59.


