|
|
|
发布时间: 2019-08-10 |
|
|
|
|

|
收稿日期: 2019-05-29
中图法分类号: TP212.9
文献标识码: A
文章编号: 1006-4729(2019)04-0395-04
|
摘要
对清洁机器人自动回程充电路径规划进行了研究, 使机器人可以依照设计要求避开障碍物, 并在最短的时间内实现充电。研究了清洁机器人的自动回程充电的路径规划, 机器人与充电器距离较远时, 采用可视图法路径规划以生成自动回程充电的最短路径; 机器人与充电器距离较近时, 通过充电器上的红外线引导机器人与充电器完全对接。实验结果显示, 可视图法可以选择最短路径进行充电, 红外线引导法可以使机器人和电源完全接触。
关键词
清洁机器人; 路径规划; 自动充电; 可视图法
Abstract
Through the research of path planning of cleaning robot, the robot can avoid obstacles according to the design requirements and realize charging in the shortest time.The path planning of automatic return charging for cleaning robot is studied, and visibility view method is taken as the path planning of automatic return charging to generate the shortest path in the case of long distance between the robot and the charger.Then the robot is fully docked with the charger through infrared guidance on the charger in the case of short distance between the robot and the charger.The simulation results show that the shortest path can be selected by visibility view method for charging, and the infrared guidance method can make the robot and the power in full contact.
Key words
cleaning robot; path planning; automatic charge; visibility view method
随着智能化技术的飞速发展与提高, 其越来越多地应用于人类息息相关的日常事务。机器人就是智能化技术的应用之一。各式各样的机器人设计与开发被应用到相应工作中去, 其目的是减轻人类劳动的强度, 进而将人类从繁琐的工作中解脱出来。机器人技术的开发主要包括控制系统、结构设计、自动识别系统以及能源动力供应等。其中, 能源动力供应的设计是机器人设计与开发的重要内容。当前, 机器人主要采用蓄电池供电。考虑如何设计开发让机器人能自动充电补充能量, 提高机器人自主判断能力, 到达高智能化程度, 是一项关键技术[1-4]。该技术主要应用于机器人自动规划路径, 避开障碍物, 寻找充电电源, 进而自动接触完成充电, 使机器获得充足的能源动力, 可长期工作。针对不同应用领域和工作环境的机器人, 国内外学者研究了各种自动充电方法, 并取得了一系列成果[5-6], 如普通直插式充电[7]、利用光伏发电原理充电[8]、利用激光导航对接充电[9]、使用红外传感器和超声波传感器相结合充电[10]等。这些都很好地解决了机器人自动充电的问题, 但也存在着某些局限性, 如不能选择最短路径进行充电以及不能完全覆盖充电电源位置范围等。
因此, 本文采用可视图法来解决以上问题。该方法可以归纳为障碍空间法中的一种特殊的方法, 能较好地弥补自由空间法存在的缺陷。本文中具体实施步骤为:首先, 假设那些轮廓复杂的障碍物近似地看作矩形或多个矩形的组合; 并由此建立起描述障碍物的边界地图; 再根据所得地图实现机器人路径规划。
1 可视图法
1.1 可视点和可视线
虽然清洁机器人的工作环境及其本身是三维的, 单从其路径进行研究的话, 可以把整个过程看作是在二维平面上。对于一个矩形障碍物来说, 在二维平面内, 除去障碍物自身, 任意一点最多能看到障碍物3个节点, 即3个可视点。视线与可视点的连线称为可视线。可视点分为内可视点、外可视点, 相对应的有内可视线、外可视线。内可视点称为无效可视点, 内可视线称为无效可视线。若障碍物是单一的矩形, 则可视线最多有3条。其中一条可视线与其他两条可视线构成的转向角乘积为负, 称其为内可视线; 另外两条则为外可视线。由此可知, 内可视线之所以称为无效可视线是因为通过内可视点的路线都会增加行径的路程。
可视点和可视线如图 1所示。其中, N1, N2, N3, N4为节点。N2, N3, N4是s点的可视点, N1是s点的不可视点。s与N2, N3, N4的连线分别为L1, L2, L3, 称之为可视线。
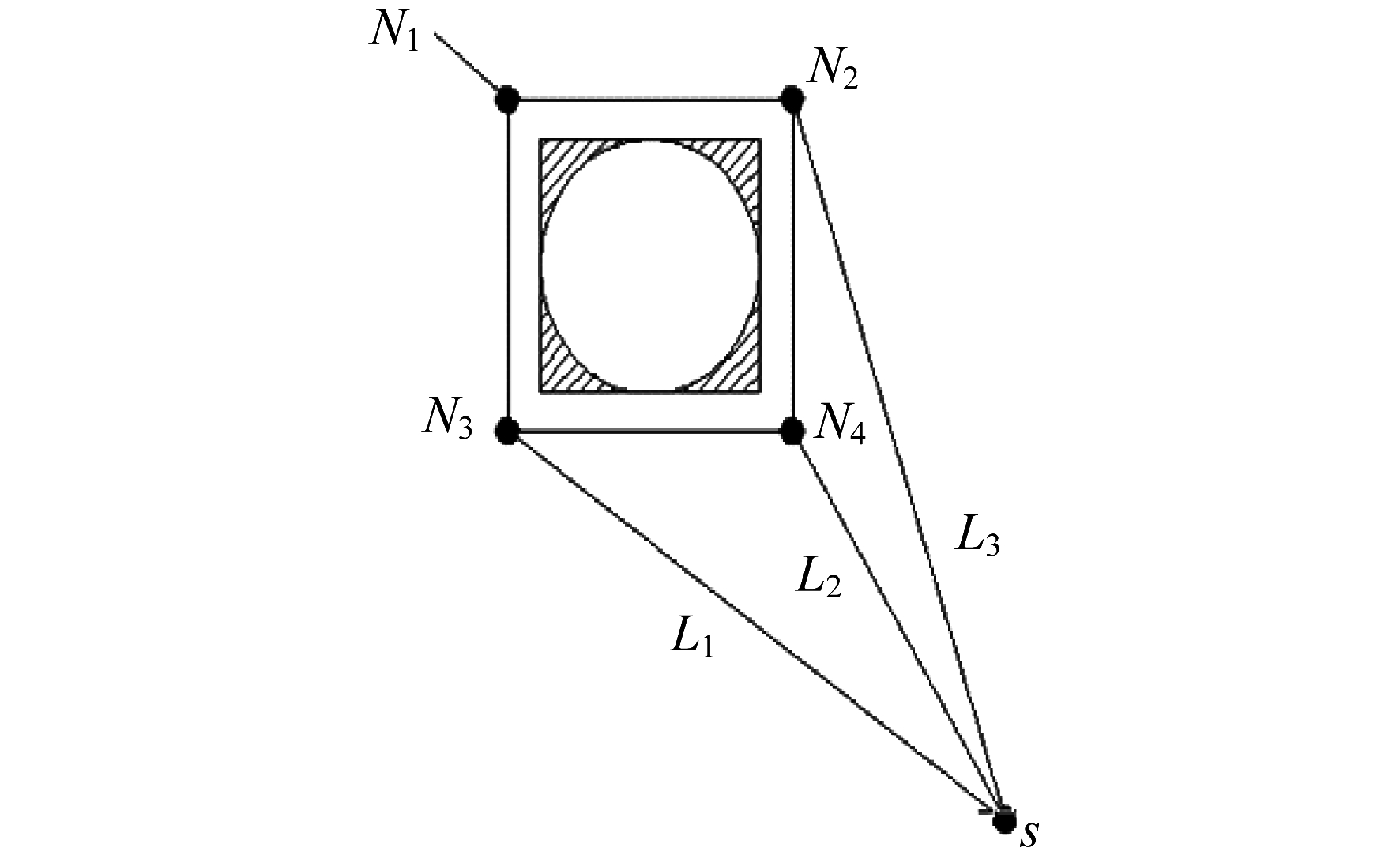

图 1中, 可视线L2与L1和L3的夹角的方向是相反的, 所以L2是内可视线; L1, L3是外可视线。
1.2 可视图法的工作原理
可视图法的目的是寻找起点与终点之间的最短路径, 那么机器人最先要判断起点与终点之间是不是有障碍物。如果没有障碍物, 机器人可以通过感应装置直接回到终点, 避免对机器人运算软件造成额外负担。
在二维坐标上, 起点和终点都会有各自的坐标值。这里假设它们分别为S点和G点。求出由S点和G点所形成的直线与障碍物所在直线的交点。假设交点坐标为(x, y), 障碍物上的点坐标为(xi, yi)。当min(xi) < x < max(xi)和min(yi) < y < max(yi)同时满足时, 则说明S点和G点之间一定有障碍物。此时, 将起点、外可视线和终点的相互交点或者起点和终点连接, 得到若干路径, 通过路径运算求出最短路径[11]。
图 2模拟了一间房间的障碍物分布。黑色块为障碍物。首先, 对障碍物做了膨胀处理[11], 于是节点自动生成。S是起点, G是终点。根据可视点和可视线的定义生成可视线。于是产生了大量的路径供选择。通过可视图法找到图 2中黑色折线为最短路径。
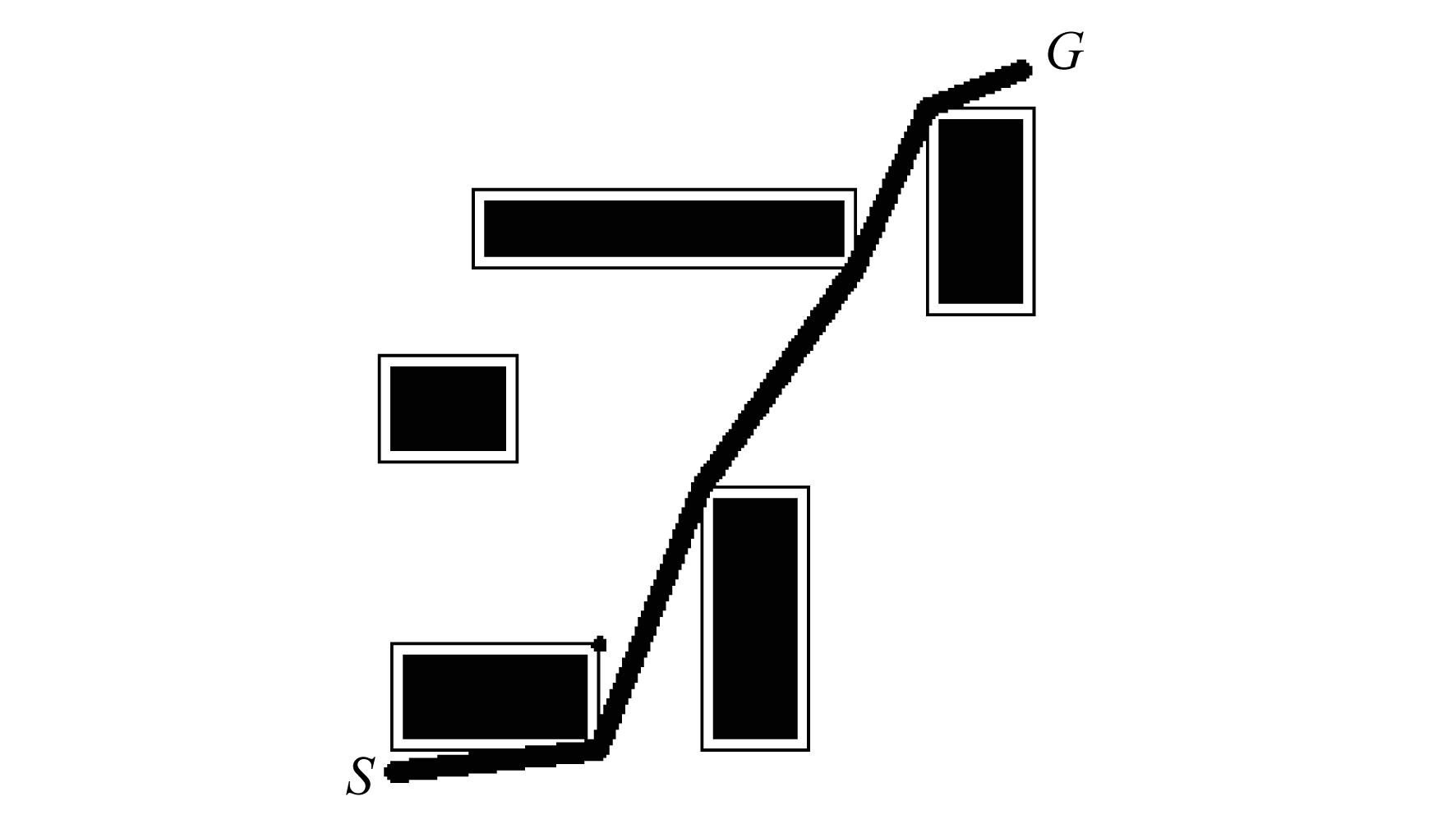
从图 2可以看出, 该路径虽然并不是理论上S点和G点的最短路径, 但是该算法成功地避开了障碍物, 同时相当可靠, 所找出的最短路径很接近理论最短路径。因此, 本文中清洁机器人沿用该算法寻找最短路径。
2 自动回程充电路径规划
2.1 可视图法路径分析
可视图法路径规划是本文设计的一种避障方法, 其目的是实现避障并生成起点与终点之间的最短路径。机器人和充电器之间存在障碍时的可视图法路径规划如图 3所示。设计步骤如下。

第1步:连接机器人和充电器得到如图 3(a)所示的直线L。
第2步:根据障碍物在直线L的垂直面P上投影的最左、最右点, 确定可视点, 即如图 3(a)所示的障碍物上的黑色圆点。
第3步:连接机器人、可视点、充电器, 得到若干路径。
第4步:删除部分无效路径, 得到如图 3(b)所示的有效路径(当两点间连线通过障碍物时, 则无效)。
第5步:判断与求解最短路径, 如图 3(c)所示的黑色加粗实线为所求得的最短路径。
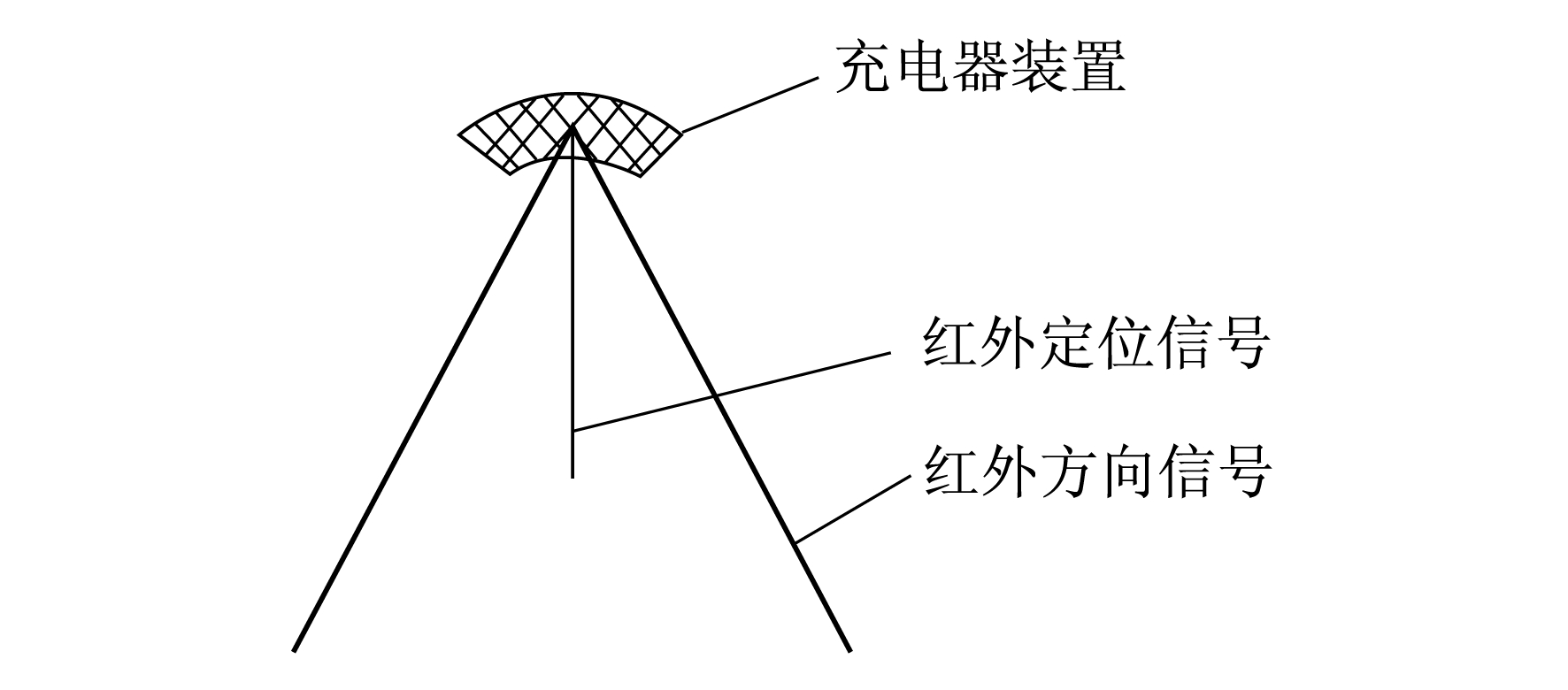
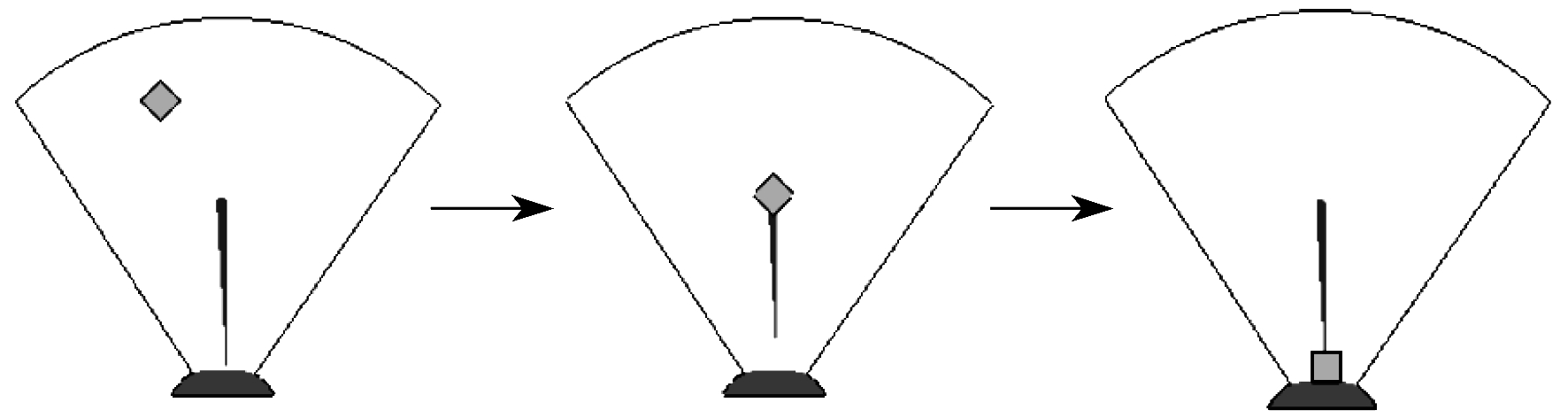
2.2 精准定位充电
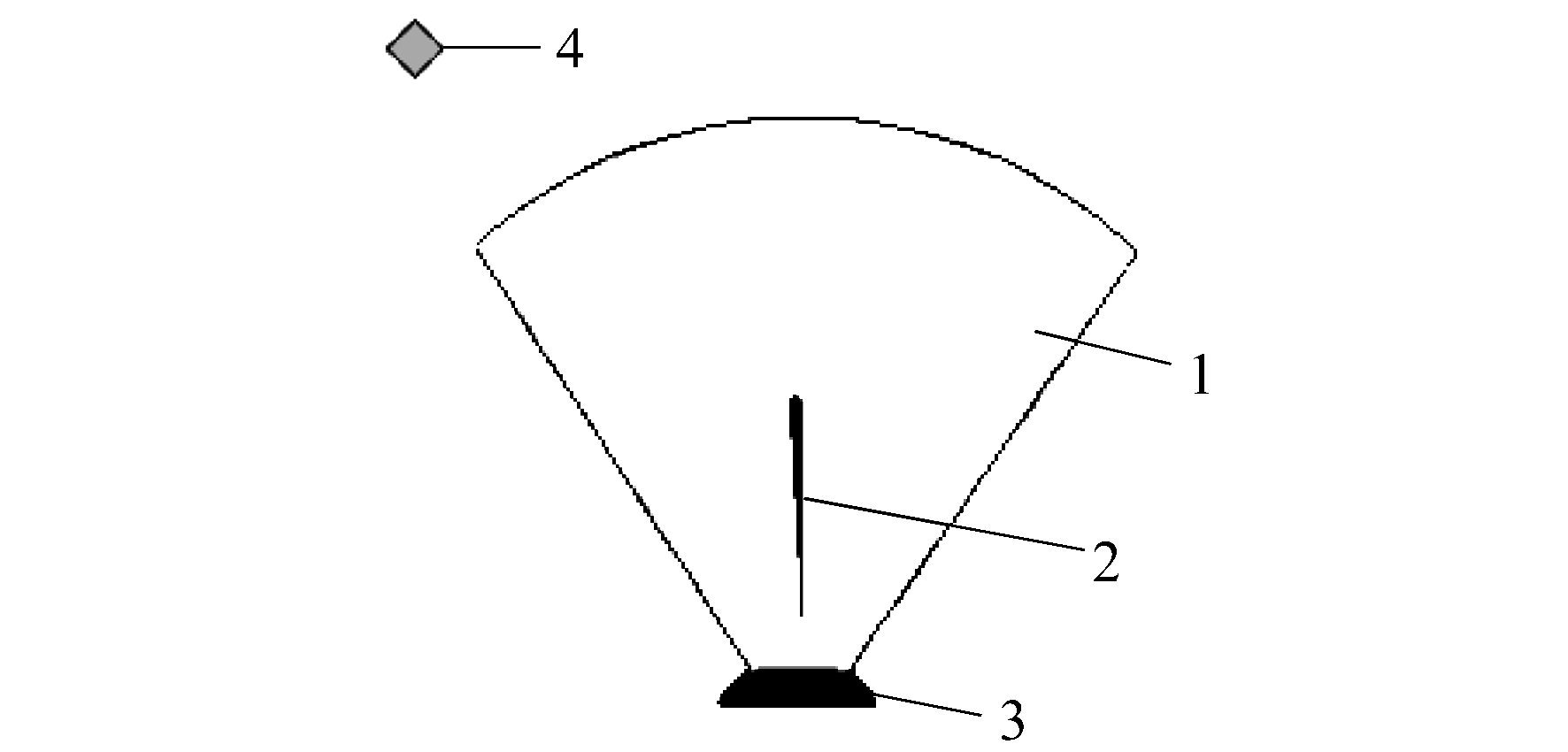
机器人运用可视图法靠近充电器, 但是由于扫描地图的精准度并不能达到100%, 因此机器人的充电头不能和充电器的充电头精准对接, 导致无法充电。为了解决这个问题, 本文在充电器上安装红外线发射器, 使其发射红外定位信号和红外方向信号, 具体如图 4所示; 而在机器人上安装红外线接收器, 使其先通过接受红外线方向信号确定充电器大致位置, 最后再通过接受红外定位信号与充电器精准对接。
3 实验结果与仿真
3.1 远距离时的路径规划
栅格法是将电子地图离散化边长为机器人直径的网络格子; 同时按照设计方法对每一个网络格子进行编号; 然后, 按照编号从小到大连线得出若干条路径; 最后, 通过算法计算得到最短路径, 即通过栅格法得到最短路径。在机器人和充电器距离较远且之间存在障碍时的离散地图上, 将栅格法和可视图法得到的最短路径进行对比, 具体如图 5所示。
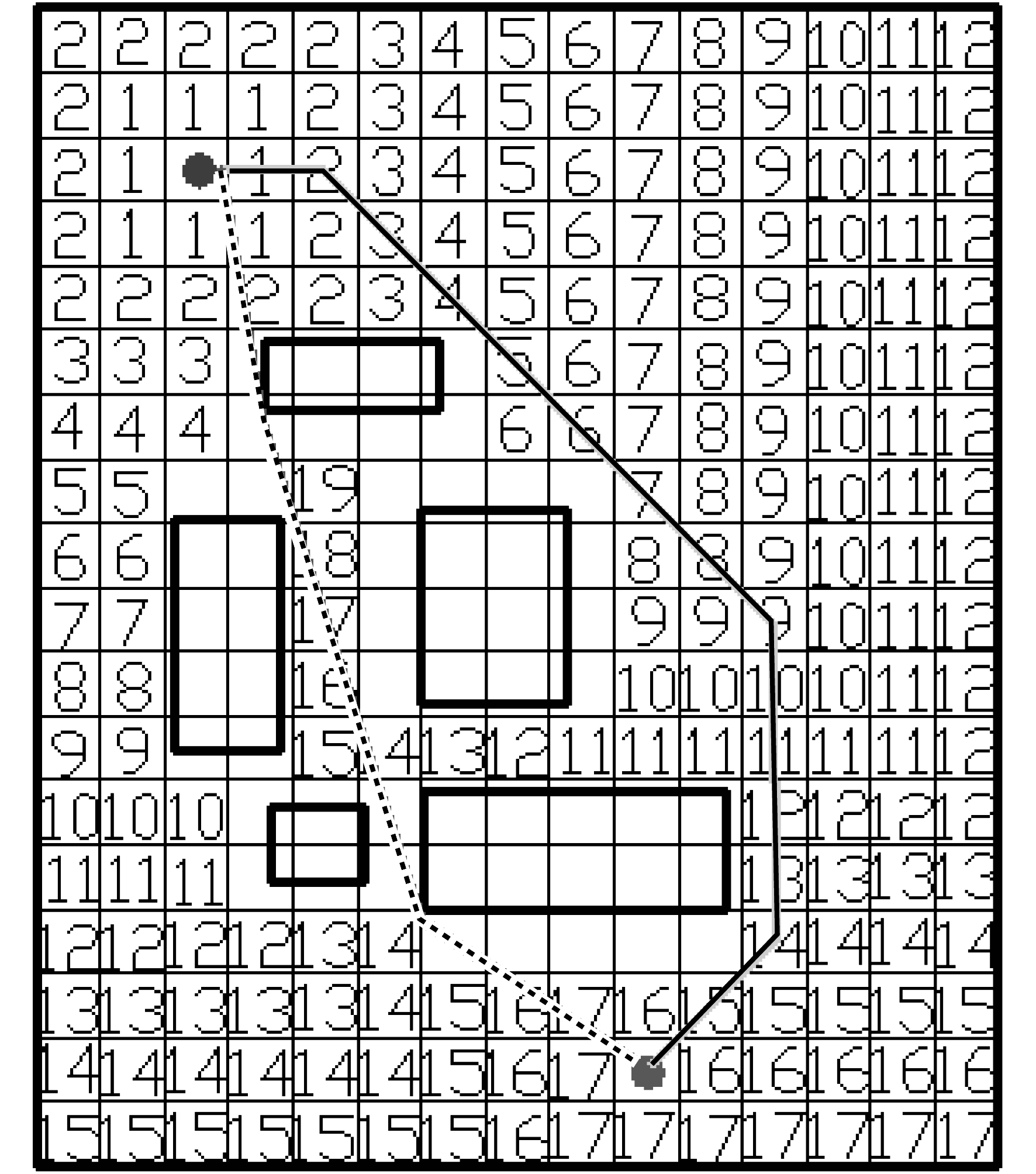
图 5中黑色实线为栅格法得到的最短路径; 黑色虚线为可视图法得到的最短路径。
从图 5中不难看出:栅格法由于其设计的局限性无法很好地利用障碍物之间的有效间隙, 当障碍物间间距较小时, 机器人将两个或几个障碍物视为一个整体, 机器人只能绕开障碍物到终点; 可视图法求得的路径比栅格法更短, 而且可视图法从算法上来说更加简单有效。
3.2 近距离时的路径规划
4 结语
清洁机器人的设计与制造过程中会涉及到很多方面的学科技术, 包括传感器技术、吸尘技术、定位技术以及电池性能等。每一项技术都值得进行更深层次的研究, 只有这样才能使得机器人变得更好、更完善, 为人类分忧解难, 具有更好市场价值。
本文提出了一种自动回程充电的方法, 在远距离状态下利用可视图法寻找最短路径, 在近距离状态下运用红外线导引法使机器人与充电器接触, 最后达到自动充电的功能。但还存在一些问题有待解决, 比如是否采用最为先进的定位技术, 否则会导致清洁机器人的定位精确度较低, 无法准确按照路线行进。
清洁机器人的后续研究包括能否提供有效方案解决上述提到的问题, 进一步使机器人摆脱地面的限制并且做到飞行或走墙壁等。
参考文献
-
[1]多判据融合小电流单相接地故障选线方法研究与实验[J]. 电工电能新技术, 2015, 34(4): 56-61. DOI:10.3969/j.issn.1003-3076.2015.04.010
-
[2]基于证据理论和信息熵的消弧线圈接地电网融合选线方法[J]. 电工技术学报, 2012, 27(6): 191-197.
-
[3]王建元, 鞠默欣, 徐志璇, 等。基于HHT小电流接地故障选线与在线故障定位方法[J].电测与仪表, 2014, 51(15): 48-54.
-
[4]庞清乐, 孙同景, 钟麦英, 等。基于粗集理论的小电流接地系统故障选线[J].中国电机工程学报, 2007, 27(4): 60-64.
-
[5]SRIKANTHAKUMAR S, CHEN W H. Optimisation-based verification process of obstacle avoidance systems for unicycle-like mobile robots[J]. International Journal of Automation & Computing, 2011, 8(3): 340-347.
-
[6]LIN Q, HAN Y J, HANH H S. Vision-based obstacle avoidance in sidewalk environment using top-view transform and optical-flow[J]. Journal of Measurement Science and Instrumentation, 2011, 2(4): 341-345.
-
[7]陈晓松.群体机器人自充电系统的设计[D].上海: 上海交通大学, 2013.
-
[8]石建军.基于光伏转换的移动机器人自动充电系统设计[D].长沙: 湖南大学, 2010.
-
[9]刘瑶. 200-500 kV无人值班变电站履带式巡视机器人[D].保定: 华北电力大学, 2012.
-
[10]郑智聪.自动充电机器人[D].福州: 福建农林大学, 2007.
-
[11]清洁机器人避障系统的路径规划算法研究[J]. 上海电力学院学报, 2018, 34(3): 264-267.


