|
|
|
发布时间: 2023-12-28 |
智能电网技术 |
|
|
|

|
收稿日期: 2023-07-03
中图法分类号: TM712
文献标识码: A
文章编号: 2096-8299(2023)06-0536-07
|
摘要
采用虚拟同步发电机(VSG)控制策略的并网逆变器可为分布式能源提供必要的惯性阻尼特性,以支撑电网频率。VSG的动态响应特性与惯量和阻尼的设定密切相关。首先,建立VSG控制模型,分析惯量和阻尼对系统动态响应指标的影响,并给出了VSG参数的计算方法。其次,结合径向基神经网络提出了一种参数协同自适应VSG控制策略,自适应调节惯量和阻尼参数来应对系统功率变化、负荷扰动及频率偏移。最后,通过MATLAB/Simulink仿真,验证所提策略的有效性和优越性。
关键词
虚拟同步发电机; 转动惯量; 阻尼系数; 神经网络
Abstract
Grid-connected inverters with a virtual synchronous generator (VSG) control strategy generate the inertial damping characteristics which is necessary for distributed energy to support the grid frequency.The dynamic response characteristics of VSG are closely related to the setting of inertia and damping.First, the VSG control model is established to analyze the influence of inertia and damping on the dynamic response index of the system, and the calculation method of VSG parameters is given.Combined with radial basis neural network, a parameter collaborative adaptive VSG control strategy is proposed.The inertia and damping parameters can be adjusted adaptively to cope with the power change, load disturbance and frequency offset.Finally, the effectiveness of the proposed strategy is verified by MATLAB/Simulink simulation.
Key words
virtual synchronous generator; virtual inertia; damping coefficient; neural network
随着“双碳”目标的推进, 高比例新能源和高比例电力电子设备的“双高”特点越来越明显。其中, 电力电子变流器在“双高”系统中承担着关键角色。因此, 通过借鉴同步发电机转子运动方程, 模拟同步发电机惯量和阻尼特性的虚拟同步发电机(Virtual Synchronous Generotor, VSG)技术应运而生[1-3]。
利用电力电子设备参数灵活可调的优点, VSG可以根据不同工况的要求灵活调节其惯量和阻尼系数, 合适的控制参数能够优化系统动态调节能力, 提高系统的稳定性。针对VSG参数的控制策略, 文献[4]基于模糊算法, 提出可靠的模糊规则和隶属函数, 使得转动惯量在调节时更为平滑, 但其模糊规则不具备普适性。文献[5]提出了基于频率变化的自适应控制方法, 提高了系统的稳定性, 但该方法忽略了阻尼的影响。文献[6]提出了基于二阶欠阻尼系统最佳阻尼比的乒乓控制策略, 依据系统频率变化情况在两组参数中进行实时切换。文献[7]将功率偏差作为控制器输入, 结合角频率响应曲线得到3组惯量和阻尼的取值, 有效改善了系统的动态响应。但文献[6-7]的方法只能分段而不能连续自适应地改变参数。文献[8-10]提出了能够连续自适应调节VSG参数的线性控制策略, 但调节效果取决于相关定系数的取值。文献[11]基于惯性和频率之间的非线性关系, 提出了一种神经网络控制方法, 有效提高了系统的抗扰动能力, 但忽略了阻尼系数对系统稳定性的影响。
现有文献关于VSG参数调节主要分为3类: 乒乓控制、线性控制和模糊控制。线性控制通过分析同步发电机的角频率与惯量之间的函数关系, 引入定系数建立近似线性关系调整惯量[9], 解决了乒乓控制存在的离散控制问题, 但线性控制中的调节系数对运行效果有较大影响, 需根据实际情况做出选择; 模糊控制则过于依赖研究人员的经验确定模糊规则和隶属度函数。从上述分析可以看出, 现有研究主要聚焦参数的控制, 鲜有将参数约束边界和控制结合。根据VSG控制参数与系统角频率ω之间的非线性关系[10], 本文将径向基函数神经网络引入到VSG控制策略中。首先, 分析不同VSG参数下系统的动态响应特性, 得到在系统频率发生扰动时惯量和阻尼的变化趋势, 考虑多种边界条件计算转动惯量和阻尼参数的取值范围。然后, 根据虚拟同步机惯量和阻尼参数的特点, 利用二阶系统最佳阻尼比, 将神经网络输出层单输出改为双输出, 进而得到自适应的惯量和阻尼参数值。最后, 通过MATLAB/Simulink仿真结果, 验证本文所提策略的有效性和优越性。
1 VSG控制原理
1.1 虚拟同步机数学模型
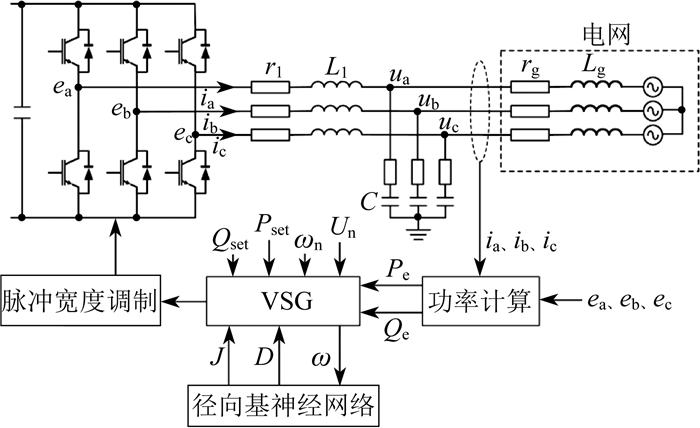
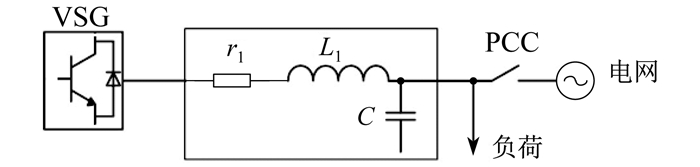
基于LC滤波的虚拟同步机电路拓扑结构如图 1所示[12]。其中, 三相桥臂中点电压ea、eb和ec等效同步发电机的电势Eq; 滤波器的电感L1和电阻r1等效同步发电机的电感Ld和定子电阻ra; 滤波电容电压ua、ub、uc等效同步发电机的端电压Ug。ia、ib、ic为逆变器输出电流, C为滤波电容, rg、Lg为线路电阻, ω为电网输出角频率, J、D为VSG的虚拟惯性和对振荡的阻尼作用; Pset为有功功率给定值; Pe为电磁功率; Qset为无功功率给定值; Qm为无功功率指令值; Qe为无功功率实际值; ωn为电网额定角频率; Un为额定相电压有效值。

根据同步发电机的二阶模型得到VSG的数学模型(令VSG极对数为1)如下:
| $\left\{\begin{array}{l}\frac{\mathrm{d} \theta}{\mathrm{d} t}=\omega \\ J \frac{\mathrm{d} \omega}{\mathrm{d} t}=\frac{P_{\mathrm{m}}-P_{\mathrm{e}}}{\omega}-D\left(\omega-\omega_{\mathrm{n}}\right) \\ P_{\mathrm{m}}=P_{\mathrm{set}}+K_{\mathrm{f}}\left(\omega_{\mathrm{n}}-\omega\right) \\ \frac{\sqrt{2} E}{K}=\int\left(Q_{\mathrm{m}}-Q_{\mathrm{e}}\right) \mathrm{d} t \\ Q_{\mathrm{m}}=Q_{\mathrm{set}}+K_{\mathrm{v}}\left(\sqrt{2} U_{\mathrm{n}}-\sqrt{2} U\right)\end{array}\right.$ | (1) |
式中: θ——虚拟内电势相角;
Pm——虚拟机械功率;
Kf——有功功率调差系数;
E——VSG虚拟内电势相电压有效值;
K——无功功率积分系数;
Kv——电压调差系数;
U——电容相电压有效值。
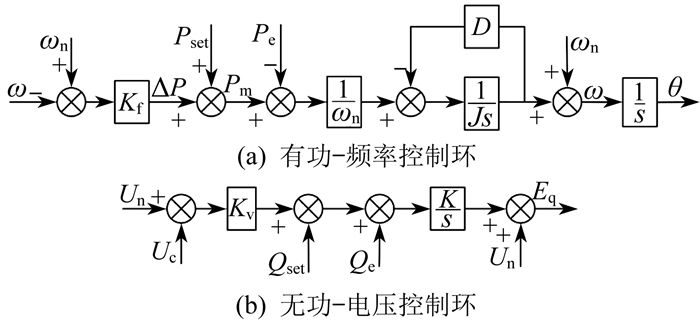
VSG控制框图如图 2所示。根据同步发电机的无功-电压下垂特性, VSG的虚拟内电势幅值Eq可由无功功率偏差经积分得到。
VSG的等效输出阻抗Z的计算公式为
| $Z=r_1+\mathrm{j} \omega\left(L_1+L_{\mathrm{v}}\right) \approx \mathrm{j} \omega\left(L_1+L_{\mathrm{v}}\right)=\mathrm{j} X$ | (2) |
式中: Lv——虚拟电感;
X——电抗阻。
引入Lv可使ω(L1+Lv)≫r1, 从而有利于实现VSG有功功率和无功功率的解耦[13]。
假设不考虑VSG输出电压与额定电压间的误差, 根据同步发电机稳态方程, VSG的输出功率为
| $\left\{\begin{array}{l}P_{\mathrm{e}}=\frac{3 E U}{X} \sin \delta \\ Q_{\mathrm{e}}=\frac{3 E U}{X} \cos \delta-\frac{3 U^2}{X} \\ \delta=\int\left(\omega-\omega_{\mathrm{n}}\right) \mathrm{d} t\end{array}\right.$ | (3) |
式中: δ——E和U之间的相位差。
1.2 控制参数对VSG输出动态性能的影响
图 3为不同惯量和不同阻尼下的有功环环路增益伯德图[14]。
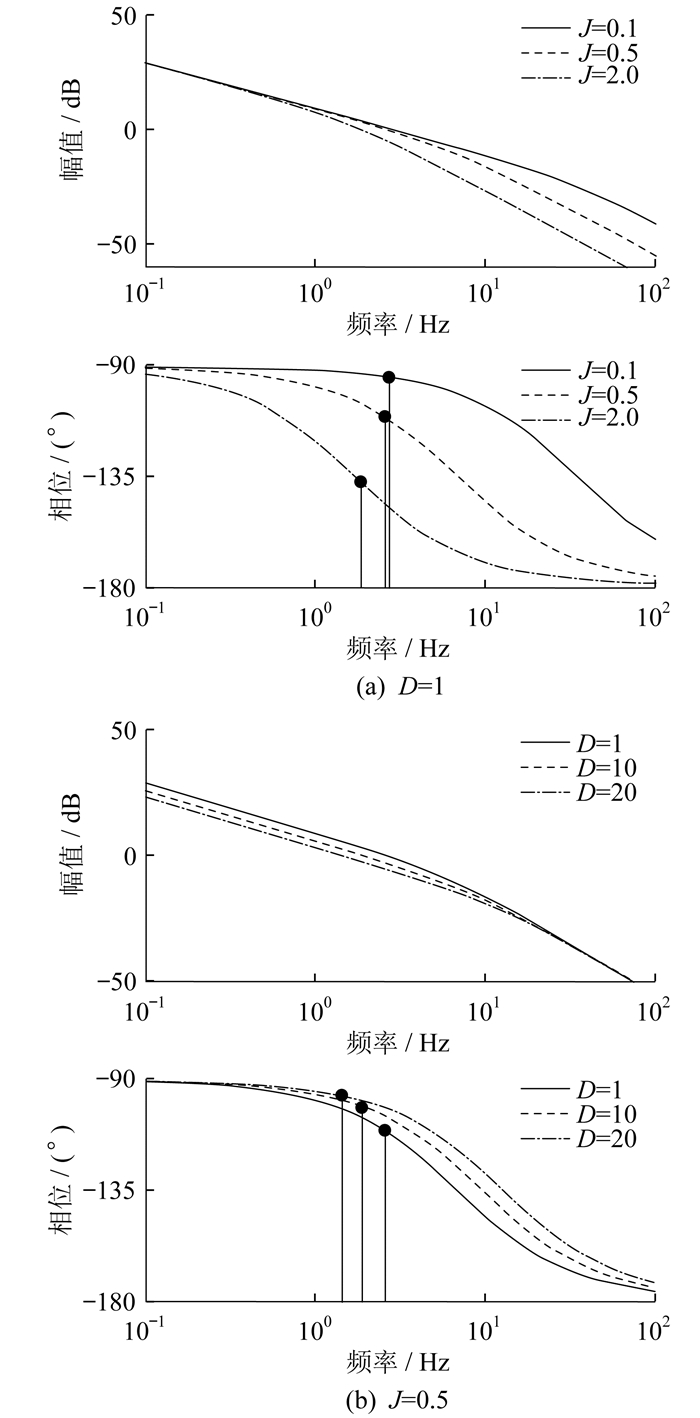
由典型二阶系统特性可知, 相角裕度γ与超调量σ成反比, γ越小, σ越大; 相角裕度γ还与调节时间ts和截止频率ωc的乘积成反比。此外, D=1时转动惯量J从小到大有功环截止频率分别为2.73 Hz、2.56 Hz、1.85 Hz, 相角裕度为85.4°、69.3°、42.5°; J=0.5时, 阻尼系数D从小到大有功环截止频率分别为2.56 Hz、1.89 Hz、1.44 Hz, 相角裕度为69.3°、78.9°、83.6°。显然, 增大惯量后截止频率和相角裕度会减小, 造成系统超调量增加, 系统调节时间延长, 而增大阻尼后相角裕度增加, 系统超调量减小。
由于频域指标不如时域指标直观、准确, 因此需进一步探究J和D与系统时域指标关系。VSG的有功环传递函数Tp(s)和频率环传递函数Tω(s)为式(4)所示, 其中: G1=3Un2/X。
| $\left\{\begin{array}{l}T_{\mathrm{p}}(s)=\frac{G_1}{J \omega_{\mathrm{n}} s^2+\left(D \omega_{\mathrm{n}}+K_{\mathrm{f}}\right) s+G_1} \\ T_\mathtt{ω}(s)=\frac{s}{J \omega_{\mathrm{n}} s^2+\left(D \omega_{\mathrm{n}}+K_{\mathrm{f}}\right) s+G_1}\end{array}\right.$ | (4) |
对式(4)进行拉普拉斯逆变换, 为
| $\left\{ {\begin{array}{l} {{P_{\rm{e}}}(t) = {P_{{\rm{set}}}}\left( {1 - \frac{{{{\rm{e}}^{\frac{{ - 0.5\frac{{D + {K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}}}{{J \cdot t}}}}\sin \left( {\sqrt {\frac{{{G_1}}}{{J{\omega _{\rm{n}}}}} - \frac{{{{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}}}{{4{J^2}}} \cdot t + \arccos \left( {\left( {\frac{D}{2} + \frac{{{K_{\rm{f}}}}}{{2{\omega _n}}}} \right)\sqrt {\frac{{{\omega _{\rm{n}}}}}{{J{G_1}}}} } \right)} } \right)}}{{\sqrt {1 - \frac{{{{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}{\omega _{\rm{n}}}}}{{4J{G_1}}}} }}} \right)}\\ {\omega (t) = {P_{{\rm{set }}}} \cdot \frac{{{{\rm{e}}^{\frac{{ - 0.5\frac{{D + {K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}}}{{J \cdot t}}}}\sin \left( {\sqrt {\left. {\frac{{{G_1}}}{{J{\omega _{\rm{n}}}}} - \frac{{{{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}}}{{4{J^2}}} \cdot t} \right)} } \right.}}{{\sqrt {J{\omega _{\rm{n}}}{G_1} - \frac{{{{\left( {D{\omega _{\rm{n}}} + {K_{\rm{f}}}} \right)}^2}}}{4}} }}} \end{array}} \right.$ | (5) |
根据式(5)可分别求出虚拟同步机输出功率和输出频率动态响应的峰值时间tpp、tpω, 超调量σp、σω和调节时间tsp、tsω, 具体为
| $\left\{ {\begin{array}{l} \begin{array}{l} {t_{{\rm{pp}}}} = \frac{\pi }{{\sqrt {\frac{{{G_1}}}{{J{\omega _{\rm{n}}}}} - 0.25{D^2}\frac{1}{{{J^2}}}} }}\\ {\sigma _{\rm{p}}} = {{\rm{e}}^{ - 0.5(D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}})\sqrt {\frac{{{\omega _{\rm{n}}}}}{{J{G_1}}}} \cdot \frac{\pi }{{\sqrt {1 - 0.25{{(D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}})}^2}\frac{{{\omega _{\rm{n}}}}}{{J{G_1}}}} }}}}\\ {t_{{\rm{sp}}}} = \frac{{7J}}{{D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}}} \end{array}\\ \begin{array}{l} {t_{{\rm{p}}\mathtt{ω} }} = \frac{{\arctan \sqrt {\frac{{\left[ {4J{G_1} - {{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}{\omega _{\rm{n}}}} \right]}}{{{{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}{\omega _{\rm{n}}}}}} }}{{\sqrt {\frac{{{G_1}}}{{J{\omega _n}}} - \frac{{{{\left( {D + \frac{{{K_f}}}{{{\omega _{\rm{n}}}}}} \right)}^2}}}{{4{J^2}}}} }}\\ {\sigma _\mathtt{ω}} = \sqrt {\frac{{4{G_1}}}{{J{\omega _{\rm{n}}}}}} {{\rm{e}}^{ - \arctan }}\left( {\sqrt {\frac{{4J{G_1}}}{{{{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}}} - 1} } \right)/\sqrt {\frac{{4J{G_1}}}{{{{\left( {D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}} \right)}^2}{\omega _{\rm{n}}}}}} - 1\\ {t_{{\rm{s}}\mathtt{ω} }} = \frac{{7J}}{{D + \frac{{{K_{\rm{f}}}}}{{{\omega _{\rm{n}}}}}}} \end{array} \end{array}} \right.$ | (6) |
将仿真参数代入式(6), 即可得到惯量和阻尼对系统动态响应指标的影响。表 1为惯量和阻尼对系统输出功率的影响。
表 1
惯量和阻尼对系统输出功率的影响
| 惯量和阻尼 | 峰值时间 | 超调量 | 调节时间 |
| J↑ | ↑ | ↑ | ↑ |
| D↑ | ↑ | ↓ | ↓ |
表 2为惯量和阻尼对系统输出频率的影响。
表 2
惯量和阻尼对系统输出频率的影响
| 惯量和阻尼 | 峰值时间 | 超调量 | 调节时间 |
| J↑ | ↑ | ↓ | ↑ |
| D↑ | ↓ | ↓ | ↓ |
从表 1和表 2可知, 系统惯量增加时, 不仅系统输出功率的超调量会增加, 系统调节时间也会延长, 因此增大系统的惯量将会导致系统功率振荡更加严重, 不利于抑制系统的功率振荡。增大阻尼系数时, 系统超调量下降, 调节时间也有减少。因此, 为了抑制VSG发生功率振荡, 系统阻尼系数不能设置得过小。对于VSG输出频率的动态响应, 增加系统转动惯量和阻尼值都能减少系统角频率的超调量, 提高系统的稳定性, 但转动惯量增加的同时, 也会延长系统的调节时间, 并且阻尼值增大还会缩短VSG系统角频率的峰值时间, 所以转动惯量和阻尼值都不能设定过大。
1.3 VSG参数范围整定
考虑VSG对功率振荡的阻尼, 且为了使系统具有较快的响应速度, 本文令有功环工作在欠阻尼状态, 0.707<ξ<1, 即为
| $0.707<\frac{1}{2}\left(D+\frac{K_{\mathrm{f}}}{\omega_{\mathrm{n}}}\right) \sqrt{\frac{\omega_{\mathrm{n}}}{J G_1}}<1$ | (7) |
根据截止频率定义, 有功环截止频率fcp的计算公式为
| $\left|G_{\mathrm{p}}\left(\mathrm{j} 2 \pi f_{\mathrm{cp}}\right)\right|=\frac{G_1}{D \omega_{\mathrm{n}}+K_{\mathrm{f}}}\left|\frac{1}{\mathrm{j} 2 \pi f_{\mathrm{cp}}} \cdot \frac{1}{\frac{\mathrm{j} 2 \pi f_{\mathrm{cp}} J}{D+K_{\mathrm{f}} / \omega_{\mathrm{n}}}+1}\right|=1$ | (8) |
为了抑制逆变器输出瞬时功率中的二倍工频脉动量, 有功环的截止频率fcp应小于2倍工频的1/10, 即fcp<10 Hz。解式(8)可得
| $J=\frac{D+K_{\mathrm{f}} / \omega_{\mathrm{n}}}{2 \pi f_{\mathrm{cp}}} \sqrt{\left(\frac{\mathrm{G}_1}{2 \pi f_{\mathrm{cp}}\left(D \omega_{\mathrm{n}}+K_{\mathrm{f}}\right)}\right)^2-1}$ | (9) |
D的取值范围可由规定逆变器接入电网连续运行条件的相应电网标准得到。考虑到当逆变器额定容量较大时, 为了保证VSG参与电网调频时的响应速度, VSG参与电网调频的程度可相应降低。虚拟同步机标准GB/T 38983.1规定了当电网频率变化1 Hz时, 逆变器输出有功功率变化40%~100%[14]。因此有:
| $\frac{S_{\mathrm{n}} \times 40 \%}{2 \pi \times 1} \leqslant D \omega_{\mathrm{n}}+K_{\mathrm{f}} \leqslant \frac{S_{\mathrm{n}} \times 100 \%}{2 \pi \times 1}$ | (10) |
式中: Sn——逆变器额定容量。
本文设计逆变器额定容量为100 kVA, 取Kf=6 366.18 W/rad, 代入式(10), 得到D的取值范围为(0, 30]。
2 基于径向基神经网络的VSG参数控制策略
2.1 径向基神经网络
与其他类型的人工神经网络相比, 径向基神经网络有生理学基础, 结构简单、学习速度快, 且能够以任意精度逼近任意非线性函数。因此, 本文选取结构为2-5-1的神经网络, 将频率变化量和频率变化率作为网络输入。神经网络结构如图 4所示。其中, wj为第j个神经元的输出层权值, hj为第j个神经元的隐含层激活系数。
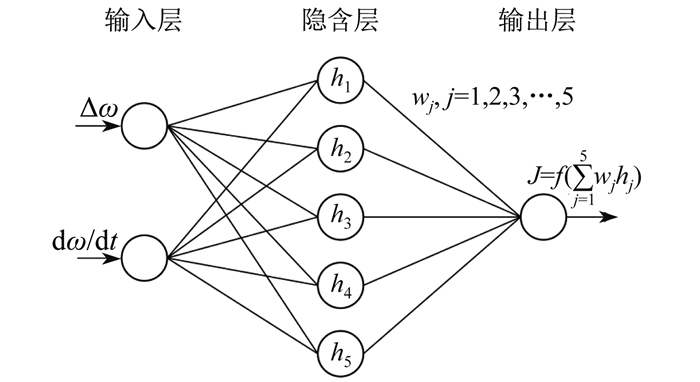
神经网络隐含层的激活函数h(x)为高斯基函数, 为
| $h(x)=\exp \left(\frac{-\left\|\vec{x}-c_j\right\|^2}{2 b_j^2}\right)$ | (11) |
式中: cj、bj——隐含层第j个神经元高斯基函数的中心和宽度;
本文采取Sigmoid函数作为神经网络输出层的激活函数, 为
| $f(x)=\frac{u}{1+\mathrm{e}^{-x}}$ | (12) |
式中: u——转动惯量上限。
本文神经网络的评价函数为
| $E(k)=\frac{1}{2}\left[\omega_{\mathrm{n}}(k)-\omega(k)\right]^2$ | (13) |
根据梯度下降法, 神经网络的权值根据式(14)、式(15)进行调整。
| $\Delta w_j(k)=-\eta \frac{\partial E(k)}{\partial w_j}+\alpha \Delta w_j(k-1)$ | (14) |
| $\frac{\partial E(k)}{\partial w_j}=\frac{\partial E(k)}{\partial \omega(k)} \frac{\partial \omega(k)}{\partial J(k)} \frac{\partial J(k)}{\partial \sum w_j h_j} \frac{\partial \sum w_j h_j}{\partial w_j}$ | (15) |
式中: η——学习率, η∈(0, 1);
α——惯性系数, α∈(0, 1)。
考虑到系统的Jacobian矩阵计算过于复杂, 本文用sign(Δω/ΔJ)代替∂ω(k)/∂J(k)。进而得到径向基神经网络的权值调整公式为
| $\begin{aligned} \Delta w_j(k)= & \eta\left[\omega_{\mathrm{n}}(k)-\omega(k)\right] \cdot \\ & \operatorname{sign}\left(\frac{\omega(k)-\omega(k-1)}{J(k)-J(k-1)}\right) \cdot \\ & \dot{f}\left[\sum\limits_{j=1}^5 w_j(k) h_j(k)\right] \cdot h_j(k)+ \\ & \alpha \Delta w_j(k-1)\end{aligned}$ | (16) |
式中: Δwj(k)——wj每次调整的差值。
2.2 自适应阻尼控制
根据典型二阶系统的动态响应特性, 本文基于固定阻尼比方式自适应调整VSG的阻尼。由式(4)可得, 有功环的阻尼比ξ与J、D的关系为
| $D=2 \xi \sqrt{\frac{J G_1}{\omega_{\mathrm{n}}}}-\frac{K_{\mathrm{f}}}{\omega_{\mathrm{n}}}$ | (17) |
当阻尼比ξ为定值时, 系统的阻尼参数D可由神经网络输出层的结果(转动惯量)经式(18)计算得到。本文取ξ= 0.8, 并将第1.3节中的仿真参数代入式(7)~式(10)可得J和D的取值范围: 0.43<J<2.67, 0<D<30。
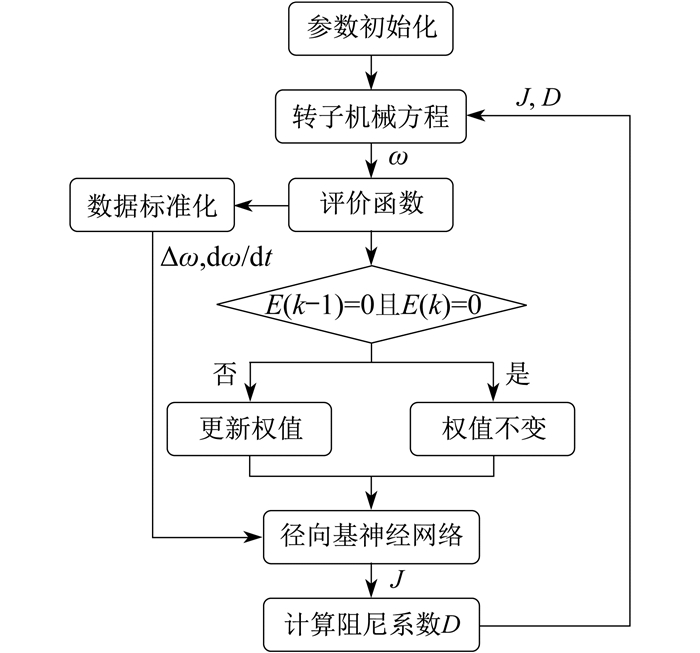
图 5为基于径向基神经网络的VSG控制流程。其中, 由式(1)可得系统角频率ω, 然后计算神经网络的输入和输出, 将输出层的输出作为转动惯量J, 再由式(17)计算得到阻尼系数D, 在迭代过程中神经网络对隐含层到输出层间的权值进行调整。
3 仿真结果验证
为了验证本文提出的VSG参数控制策略, 利用MATLAB/Simulink搭建仿真电路如图 6所示。其中, 系统初始状态带20 kW负荷运行, 主电路及VSG控制参数为: 直流侧电压Udc=800 V, r1= 0.2Ω, L1=2 mH, C=30 μF, 同步角频率ωn= 100 π rad/s, 额定线电压Un=220 V, Kf=6 366.18 W/rad, Kv=3 214 VA/V, K=0.05, Lv=2 mH。
仿真场景设置为系统初始状态带20 kW负荷运行, 在0.6 s时刻负荷增加20 kW并持续0.5 s, 在1.5 s时刻电网频率下降0.2 Hz。针对该仿真场景, 结合J、D取值范围, 本文比较了4种VSG控制下的仿真结果。即定参数VSG 1, J=0.5, D=1;神经网络自适应惯量VSG 2, J0=0.5, D=1;神经网络自适应惯量阻尼VSG 3, J0=0.5, 阻尼比ξ取0.8;常规自适应[9]VSG 4, J0=0.5, D0=1;
当系统出现负荷扰动时, 在VSG 3控制下, 参数J变化情况如图 7所示。
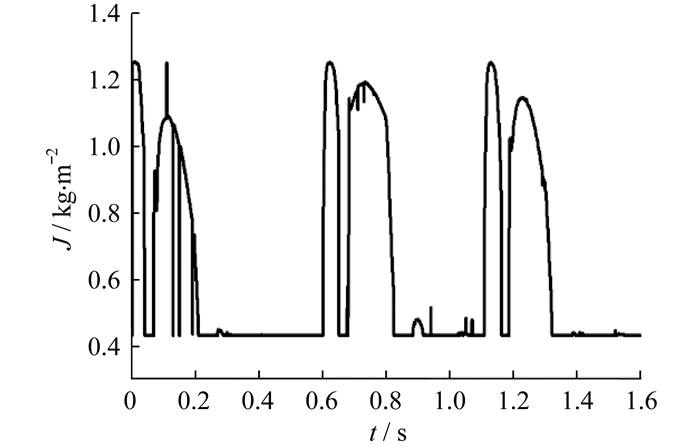
由图 7可知, J的曲线变化灵活且随着神经网络学习次数的增加, 转动惯量的学习权值得到优化, 使系统得到的控制参数更加准确。
图 8为仿真结果。
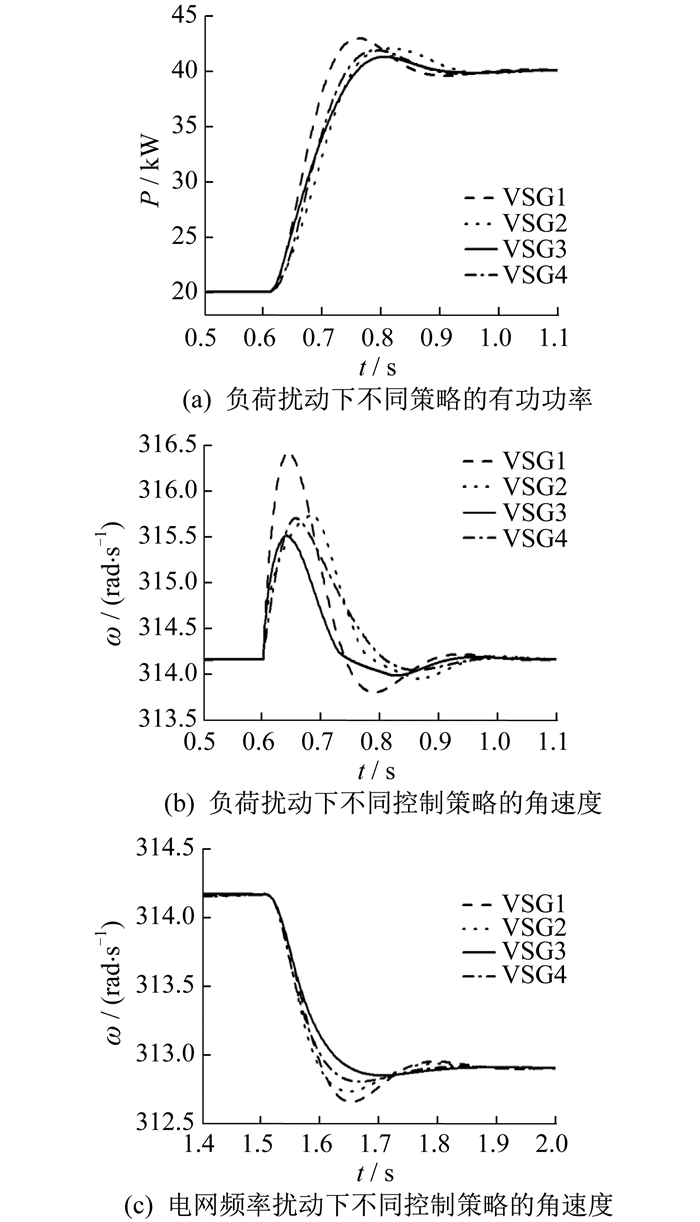
由图 8可知, 在0.6 s时, 系统受到负荷扰动, 与VSG 1相比, VSG 2和VSG 4均降低了系统输出功率的超调量, VSG 2略微延长了功率控制的调节时间, VSG 3则有着最小的功率超调量以及最快的响应速度; 关于4种控制策略对角频率控制的效果, VSG 2和VSG 4明显改善了对负荷扰动的缓冲效果, VSG 3的控制效果最好, 角频率偏差仅有1.32 rad/s。
4 结论
本文基于神经网络能够逼近任意非线性函数的特点以及神经网络的学习能力, 将径向基神经网络用于调节VSG的转动惯量, 并通过具体分析VSG控制参数对系统动态响应的影响, 将二阶系统最佳阻尼比引入到神经网络算法中, 从而得到适用于VSG的径向基神经网络参数自适应控制策略。通过VSG并网仿真模型对所提策略进行验证并得到以下结论。
(1) 转动惯量和阻尼系数同时影响VSG频率和输出功率的响应特性, 因此只调节单一参数无法实现VSG的理想控制效果。
(2) 采用径向基神经网络控制时, VSG转动惯量的自适应调节有着较高的灵活度, 能够有效优化逆变器输出功率和输出频率的动态响应特性, 提高系统鲁棒性。
(3) 本文的神经网络VSG控制策略目前只应用到了单台逆变器上。由于不同工况下多台逆变器并联时需要不同的VSG控制参数, 所以如何充分利用神经网络的特点来更好地实现多机并联下的功率精确分配以及抑制功率环流和振荡, 还需要进一步研究。
参考文献
-
[1]ZHONG Q, WEISS G. Synchronverters: inverters that mimic synchronous generators[J]. IEEE Transactions on Industrial Electronics, 2011, 58(4): 1259-1267. DOI:10.1109/TIE.2010.2048839
-
[2]ZHONG Q C, NGUYEN P L, MA Z, et al. Self-synchronized synchronverters: inverters without a dedicated synchronization unit[J]. IEEE Transactions on Power Electronics, 2014, 29(2): 19-23.
-
[3]MO S, PENG B, SHUAI Z, et al. A new self-synchronization control strategy for grid interface inverters with local loads[C]//2015 IEEE Energy Conversion Congress and Exposition. Montrel, Canda: IEEE, 2015: 2316-2320.
-
[4]杨帆, 邵银龙, 李东东, 等. 一种计及储能容量和SOC约束的模糊自适应VSG控制策略[J]. 电网技术, 2021, 45(5): 1869-1877.
-
[5]刘尧, 陈建福, 侯小超, 等. 基于自适应虚拟惯性的微电网动态频率稳定控制策略[J]. 电力系统自动化, 2018, 42(9): 75-82.
-
[6]WANG F, ZHANG L J, FENG X Y, et al. An adaptive control strategy for virtual synchronous generator[J]. IEEE Transactions on Industry Applications, 2018, 54(5): 5124-5133. DOI:10.1109/TIA.2018.2859384
-
[7]陈来军, 王任, 郑天文, 等. 基于参数自适应调节的虚拟同步发电机暂态响应优化控制[J]. 中国电机工程学报, 2016, 36(21): 5124-5731.
-
[8]LI D D, ZHU Q W, LIN S F, et al. A self-adaptive inertia and damping combination control of VSG to support frequency stability[J]. IEEE Transactions on Energy Conversion, 2017, 32(1): 397-398. DOI:10.1109/TEC.2016.2623982
-
[9]杨赟, 梅飞, 张宸宇, 等. 虚拟同步发电机转动惯量和阻尼系数协同自适应控制策略[J]. 电力自动化设备, 2019, 39(3): 125-131.
-
[10]胡健雄, 程静, 王维庆, 等. 基于VSG的风光互补系统自适应功频控制策略[J]. 电力电子技术, 2023, 57(6): 82-85.
-
[11]杨旭红, 姚凤军, 郝鹏飞, 等. 基于改进型RBF神经网络的VSG转动惯量自适应控制[J]. 电测与仪表, 2021, 58(2): 112-117.
-
[12]胡文强, 吴在军, 孙充勃, 等. 基于VSG的储能系统并网逆变器建模与参数整定方法[J]. 电力自动化设备, 2018, 38(8): 13-23.
-
[13]张林, 张海波, 蒋维勇, 等. 基于自适应动态虚拟同步阻抗的虚拟同步机功率解耦策略[J]. 中国电机工程学报, 2023, 43(7): 1-13.
-
[14]颜湘武, 张伟超, 崔森, 等. 基于虚拟同步机的电压源逆变器频率响应时域特性和自适应参数设计[J]. 电工技术学报, 2021, 36(增刊): 241-254.


