|
|
|
发布时间: 2024-06-28 |
控制与检测技术 |
|
|
|

|
收稿日期: 2023-11-23
中图法分类号: TP312
文献标识码: A
文章编号: 2096-8299(2024)03-0259-06
|
摘要
为解决在核电施工中雾炮机工作时间过长导致水电资源浪费的问题,以一体化物联网网关为基础,通过多源信息的采集与融合,提出了一种扬尘预测控制算法。该算法根据施工现场和环境情况,从扬尘产生和降尘措施两方面进行量化研究,建立了扬尘预测模型,对扬尘扩散进行预测,并根据预测结果控制雾炮机工作时长,以达到提前降尘和节能的目的。在核电现场进行了对比实验,结果表明,该算法在保障降尘效果基本不变的前提下,节约了60%左右的水电资源。
关键词
核电建筑工地; 多源数据; 物联网网关; 扬尘预测控制算法
Abstract
In nuclear power plant construction, the prolonged operation of dust suppression cannons leads to the wastage of water and electricity resources. Leveraging an integrated Internet of Things (IoT) gateway, a dust prediction and control algorithm is designed through the collection and integration of information from multiple sources. This algorithm quantitatively studies dust generation and dust reduction measures based on the construction site and environmental conditions, establishing a dust prediction model. The model predicts dust dispersion and, based on the forecast results, controls the duration of operation for the dust suppression cannons to achieve the goals of early dust reduction and energy conservation. Comparative experiments conducted at the nuclear power site demonstrates that, under unchanged dust reduction effectiveness, the algorithm achieved an about 60% reduction in water and electricity consumption.
Key words
nuclear power construction site; multi-source data; Internet of Things (IoT) gateway; dust prediction and control algorithm
扬尘是指地表受风力、人为扰动等作用而进入大气的固体颗粒物,是大气颗粒物(PM10和PM2.5等)的重要来源。在核电建筑施工现场,由于泥土过于干燥、露天堆场和仓库覆盖不到位、使用大型机械设备等原因,使得工地出现的扬尘污染问题十分严重[1-2]。为防止扬尘对环境的污染,在施工中会使用雾炮机进行液雾降尘,抑制灰尘的流动[3]。针对不同施工现场的扬尘扩散情况,学者们开展了广泛的研究。谢海花等人[4]根据公路施工特点,将监测设备得到的实时数据作为影响因子的参考数据,提出了用回归模型预测公路施工扬尘扩散。刘伟等人[5]研究了施工扬尘的空间分布及扩散特性,提出了综合评估施工扬尘污染严重程度的分级方法与管理控制措施。周红等人[6]利用计算流体力学对土方运输阶段不同工况下的扬尘扩散进行模拟,获取了场地内各区域扬尘扩散情况和扬尘的质量浓度。
目前,针对扬尘的研究主要集中在扬尘扩散和模型预测方面,但在节能降尘方面未做过多考虑。雾炮机工作时长由工作人员主观控制,存在不能根据扬尘扩散情况智能控制喷淋水量的问题,导致雾炮机工作时间过长,带来不必要的水电资源浪费。对此,本文提出了一种扬尘预测控制算法,依据一体化物联网网关对核电建筑施工中影响扬尘产生因素的多源信息进行采集和融合,建立了扬尘预测模型。该模型一方面对扬尘扩散趋势进行预测,另一方面根据预测趋势和现场情况控制雾炮机的工作时长,实现了雾炮机智能降尘。与人工控制雾炮机相比,本文所提算法在保障降尘效果基本不变的同时,达到了节能环保的效果。
1 扬尘预测控制算法
1.1 多源设备信息采集
核电建筑施工中影响扬尘产生的因素有土壤含水量、施工阶段、风速等。土壤含水量表示土壤干燥程度,土壤含水量越少,表明土壤越干燥,越容易产生扬尘;施工阶段分为土方施工、主体建设、装饰施工和竣工清理4个阶段,每个阶段都会产生扬尘污染,其中土方施工阶段污染最大;对于工地中存在范围较大的干燥裸露土面,风会带起土壤表面的扬尘,增大空气中扬尘的浓度。对此,网关通过人脸机对进入工地的施工人员数量和工种信息数据进行采集,根据施工人员数量最多的工种信息判断当前工地内的施工阶段;通过环境监测仪、风速传感器设备对施工中风向、PM10的质量浓度和风速数据进行采集,可知晓工地内的扬尘污染情况和环境情况。
影响降尘的因素有雾炮机降尘能力和现场环境情况。雾炮机的水流量和喷洒面积体现了雾炮机的降尘能力;现场环境中温度、风速会影响雾炮机的喷淋效果以及土壤中水分的保持时间。网关通过温度传感器、风速传感器对温度和风速数据进行采集,得到工地的环境状况。
网关对不同设备进行数据采集,通过对数据的融合和预测分析,构建扬尘预测模型。
1.2 建筑工地扬尘融合分析
网关根据风速传感器和人脸机所采集的数据对风速和施工阶段的扬尘产生进行预测。土壤干燥未施工的情况下,风速小于3 m/s时,风速对扬尘浓度的影响可忽略不计[7];当风速增大后,风速会显著增强扬尘的扩散,对当前和未来一段时间内环境中扬尘浓度产生影响。根据风速对PM10的质量浓度进行预测,其表达式为
| $ Q_{1}= \begin{cases}0, & v<3 \\ 8.4 v^{2}-24.78 v-1.26, & v \geqslant 3\end{cases} $ | (1) |
式中:Q1——受风速影响未来一段时间的PM10预测质量浓度,μg/m3;
v——风速,m/s。
在建筑施工中,由于土方开挖、渣土车运输等原因,使得土方施工阶段产生的扬尘量最大,另外3个阶段污染量比土方施工阶段小33%[8]。网关对当前扬尘的增长速率进行监测,并根据不同施工阶段对PM10的质量浓度进行预测,其表达式为
| $ Q_{2}= \begin{cases}3 K, & i=1 \\ K, & i=2\end{cases} $ | (2) |
式中:Q2——受施工影响未来一段时间的PM10预测质量浓度,μg/m3;
K——当前时刻扬尘增长的质量浓度,μg/m3;
i——当前施工阶段,i=1时表示土方施工阶段,i=2时表示其他施工阶段。
结合式(1)和式(2),可得未来一段时间施工中扬尘预测质量浓度U为
| $ U=Q_{1}+Q_{2} $ | (3) |
1.3 雾炮机降尘融合分析
雾炮机喷洒水雾增加扬尘的含水量,使得灰尘间水分黏性作用力增强,灰尘颗粒被吸附在大颗粒周围,使之不能随高能湍流场运动,从而对扬尘起到很好的抑制作用。扬尘抑制率反映了土壤含水量对扬尘的抑制效果,粉尘含水量越大,扬尘抑制率则越高,降尘效果越好。当土壤含水量过大时,虽然扬尘抑制率达到最大值,但会导致不必要的水资源浪费。土壤含水量在4.5%时,可以在实现降尘的同时节约水电资源[9]。
雾炮机降尘效果受环境中风速和温度的影响,风速增大会加快灰尘中水分的挥发速度,从而减弱颗粒含水量对PM2.5的抑制效果[10]。扬尘抑制率与土壤含水量和风速的关系式为
| $ Z=(7.41+44.36\;{\rm{ln}}{\mathit{w}}) \times 1.05 \mathrm{e}^{-0.04 v} $ | (4) |
式中:Z——扬尘抑制率,%;
w——土壤含水量,%。
雾炮机在不同环境温度下喷雾蒸发量不同。随着空气温度升高,雾粒蒸发量增大,沉降的雾粒质量逐渐减少[11]。喷雾蒸发方程为
| $ c=\frac{m_{1}}{m_{2}}=0.24 \mathrm{e}^{0.1 \theta} $ | (5) |
式中:c——喷雾蒸发百分比值,%;
m1——单位时间内雾粒蒸发的质量,kg/s;
m2——单位时间内雾粒总质量,kg/s;
θ——环境温度,℃。
雾炮机工作时水流量记为x(L/min),喷射面积为S(m2)。土壤最大干密度取1.5 g/cm3,则1 t干燥尘土泥土体积为0.67 m3。若雾炮机喷淋的土壤表面厚度为1 mm,根据式(5)可得,土壤含水量与雾炮机工作时长关系式为
| $ w=\frac{x t(1-c)}{1.5 S} $ | (6) |
式中:t——雾炮机工作时长,min。
根据式(4)~式(6),可得雾炮机工作时长与扬尘抑制率、环境温度和风速的关系式为
| $ t=\frac{1.5 S}{x\left(1-0.24 \mathrm{e}^{0.1 t}\right)} \times \mathrm{e}^{\frac{Z}{\frac{1.05 \times \mathrm{e}^{-0.04 v}}{44.36}-7.41}} $ | (7) |
1.4 扬尘预测模型建立
核电施工现场传感器与网关现场布置如 图 1所示。图 1中,人脸机位于施工区域的入口处,根据人脸机采集数据判断施工阶段。施工现场配备的温度传感器、风速传感器和环境检测仪能检测温度、风速、风向和PM10的质量浓度,网关通过对传感器数据采集可知晓施工现场和环境情况。为了提高检测精确度,环境检测仪安装在施工场地的15 m之内[12]。雾炮机布置在施工区域的一侧,其喷淋范围可覆盖整个裸露土表面。
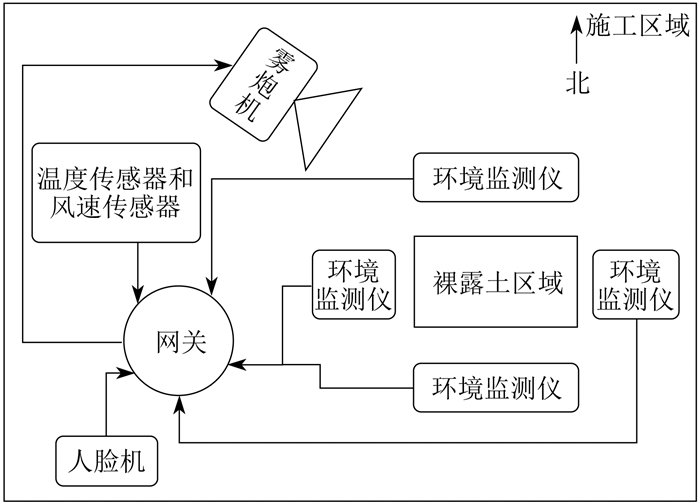

在裸露土区域的东西南北4个方向各安装一台环境监测仪。根据风向正交分解和合成算法,可将风向分解为东西向与南北向,下风向与上风向的PM10的质量浓度差即为该风向的扬尘净质量浓度。东西向检测到扬尘净质量浓度为P1,南北向检测到的扬尘净质量浓度为P2。裸露土区域内检测到扬尘净质量浓度k可表示为
| $ k=\sqrt{\left(P_{1}\right)^{2}+\left(P_{2}\right)^{2}} $ | (8) |
网关对扬尘净质量浓度数据进行采集,当前时刻和前t1时刻这段时间内扬尘净质量浓度变化速率V为
| $ V=\frac{k_{1}-k_{2}}{t_{1}} $ | (9) |
式中:k1,k2——当前时刻和前t1时刻这段时间内扬尘净质量浓度,μg/m3。
根据式(3)可得扬尘预测质量浓度为
| $ U= \begin{cases}8.4 v^{2}-24.78 v-1.26+3 V t_{1}, & i=1, v \geqslant 3 \\ 8.4 v^{2}-24.78 v-1.26+V t_{1}, & i=2, v \geqslant 3 \\ 3 V t_{1}, & i=1, v <3 \\ V t_{1}, & i=2, \quad v<3\end{cases} $ | (10) |
施工中,因为受土壤不完全干燥或其他因素的影响,会造成扬尘预测质量浓度与实际环境质量浓度不相等的情况。扬尘预测控制算法会依据现场情况适当更改扬尘的质量浓度预测值,以更好地适应现场环境。当前时刻扬尘预测质量浓度矫正公式如下:
| $ U_{1}=U-k_{2}-U_{2}+k_{1} $ | (11) |
式中:U1——矫正后的当前时刻扬尘预测质量浓度,μg/m3;
U2——前t1时刻对当前时刻扬尘的预测质量浓度,μg/m3。
当前时刻与前t1时刻这段时间内,扬尘的预测质量浓度变化速率V1的公式为
| $ V_{1}=\frac{U_{1}-U_{2}}{t_{1}} $ | (12) |
扬尘预测控制算法根据式(12)预测一段时间后工地中扬尘污染程度。若预测到扬尘浓度增长趋势过快,则在污染程度达到最大前就将雾炮机打开,实现提前降尘。扬尘抑制率Z与施工现场扬尘净质量浓度以及扬尘的质量浓度增长速率有关,可得关系式如下:
| $ Z=\left\{\begin{array}{lr} \frac{k_{1}}{80}, & k \geqslant 60 \\ \frac{V_{1}}{40}+\frac{V}{40}, & 10 \leqslant k<60 \\ 0, & k<10 \end{array}\right. $ | (13) |
在施工工地内扬尘污染程度很低时,雾炮机不开启;当扬尘污染程度升高,扬尘预测控制算法根据预测情况控制雾炮机的工作时长;若扬尘污染程度很严重,则直接开启雾炮机。
将式(13)中求得的扬尘抑制率代入式(7),可得
| $ \overline t = \left\{ \begin{array}{l} \frac{1.5 S}{x\left(1-0.24 \mathrm{e}^{0.11}\right)} \times \mathrm{e}^{\frac{\frac{k_1}{84 \times \mathrm{e}^{-0.04 v}}-7.41}{44.36}}, \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\; k \ge 60 \\ \frac{1.5 S}{x\left(1-0.24 \mathrm{e}^{0.1 t}\right)} \times \mathrm{e}^{\frac{\frac{U_1+k_1-U_2-k_2}{42 \times t_1 \times \mathrm{e}^{-0.04 v}}-7.41}{44.36}}, \;\;\;\;\;\;\;\;\;\;\;\;\;\;\; 10 \le k < 60 \\ 0, \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\; k < 10 \end{array} \right. $ | (14) |
结合现场环境情况,可得雾炮机降尘所需的工作时长。
2 实验过程及分析
2.1 实验场景
本文中,实验所使用的一体化网关由主控板、数字信号处理技术(Digital Signal Processing,DSP)采集板、模拟量和开关量接口板构成。主控板选用以CM4为核心板,板载以太网、USB等外设接口,支持网络和物理接口形式的数据接入和处理;DSP采集板以TMS320F28069处理器为核心,通过模拟量和开关量接口板进行数据采集和输出控制,并将采集到的数据发送给主控板。网关内部结构如图 2所示。
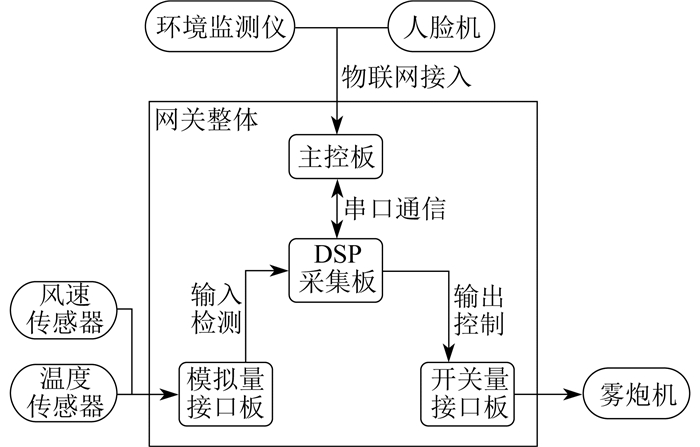
实验场地位于三门市某核电施工场地内。三门市属亚热带季风气候,因此在工地西北和东南方向安装环境监测仪。位于实验场地内的人脸机(生产厂家为海康威视)、环境检测仪(生产厂家为谱瑞森社)通过物联网方式由主控板进行信息拉取;风速和温度的传感器(生产厂家为谱瑞森社)经模拟量接口板由DSP采集板完成数据采集,然后通过串口通信将数据发送给主控板进行处理;雾炮机接于开关量接口板上,主控板能够直接对开关量进行控制。
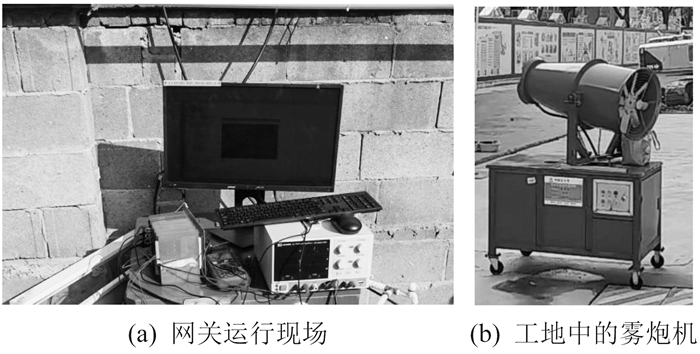
施工现场设备布置如图 3所示。
2.2 实验数据分析
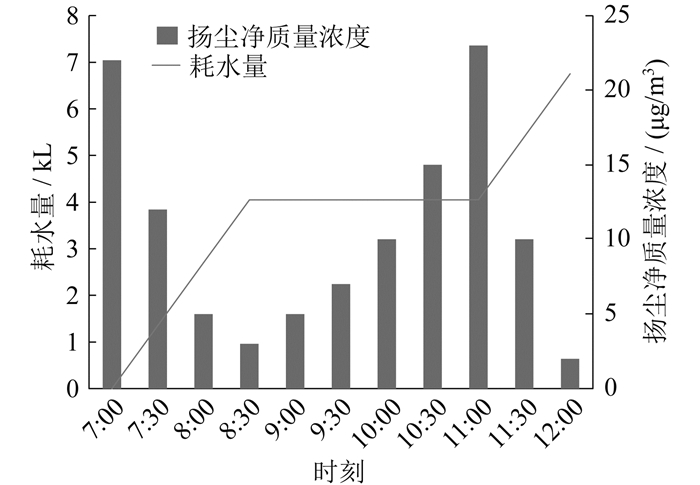
在核电建筑工地内未安装使用扬尘预测控制算法的网关时,雾炮机由人工手动控制。工作人员根据施工情况和土壤干燥情况控制雾炮机,当施工作业或土壤干燥易起沙尘时,雾炮机会长时间开启。人工控制雾炮机虽能有效降低扬尘的扩散,但浪费了大量水电资源。在某次施工作业时,即未使用算法时工地中扬尘净质量浓度与雾炮机耗水量如图 4所示。实验选用某60型喷雾除尘车,在无风状态下喷雾水平射程为60 m,水流量为45 L/min,喷射面积为9 400 m2。施工前雾炮机被手动开启,当土壤非常潮湿不会产生扬尘后关闭雾炮机;施工中由于水分蒸发,土壤逐渐变干燥,扬尘污染程度升高,雾炮机于11:00后又被开启。
在核电建筑工地内安装使用扬尘预测控制算法的网关对雾炮机进行控制,使用算法后工地中扬尘净质量浓度与雾炮机耗水量如图 5所示。
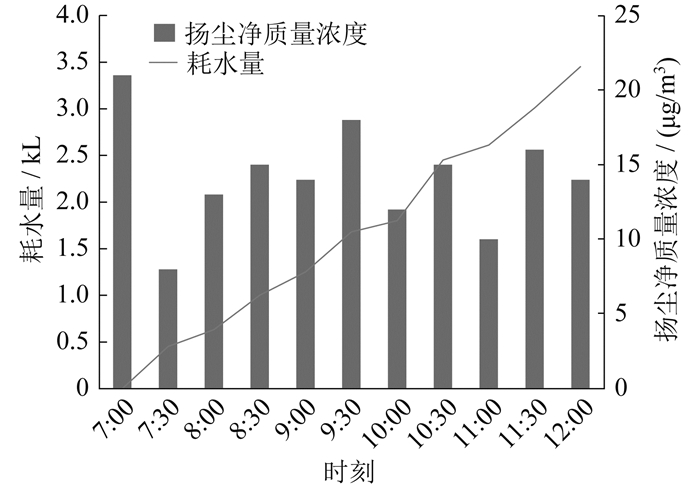
由图 4和图 5可知:使用算法后雾炮机会根据环境中扬尘的质量浓度进行智能降尘,雾炮机开启和关闭相比未使用算法时更频繁,在降尘效果基本不变的情况下,雾炮机耗水量更少,更节省水资源。
在不同日期和不同天气情况下,对使用扬尘预测控制算法后的雾炮机进行现场实验,记录雾炮机工作时的耗水量,同时预估相同场景下未使用算法时的雾炮机耗水量。使用算法前后雾炮机耗水量对比和统计分别如图 6和表 1所示。
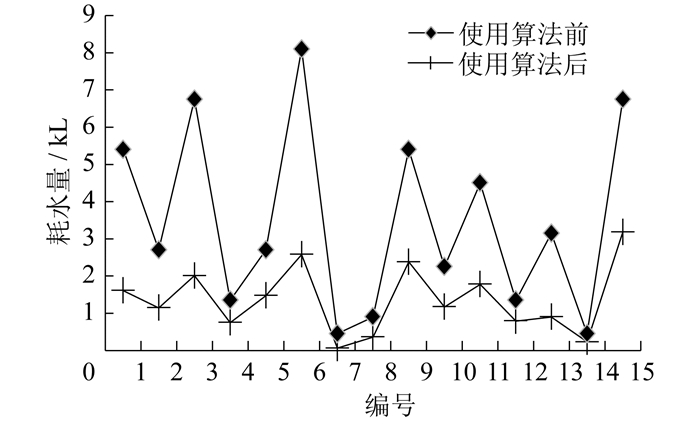
表 1
使用算法前后雾炮机耗水量统计
| 编号 | 耗水量 | 编号 | 耗水量 | |||
| 使用算法前 | 使用算法后 | 使用算法前 | 使用算法后 | |||
| 1 | 5.400 | 1.611 | 9 | 5.400 | 2.380 | |
| 2 | 2.700 | 1.145 | 10 | 2.250 | 1.170 | |
| 3 | 6.750 | 2.011 | 11 | 4.500 | 1.780 | |
| 4 | 1.350 | 0.750 | 12 | 1.350 | 0.790 | |
| 5 | 2.700 | 1.476 | 13 | 3.150 | 0.900 | |
| 6 | 8.100 | 2.580 | 14 | 0.450 | 0.230 | |
| 7 | 0.450 | 0.060 | 15 | 6.750 | 3.180 | |
| 8 | 0.900 | 0.360 | 总计 | 52.200 | 20.423 | |
由图 6和表 1可知,在雾炮机降尘效果基本不变的前提下,使用算法后的雾炮机比使用算法前节约耗水量60.88%,达到设计预期效果。
3 结语
核电建筑工地内扬尘预测控制算法依托可接入多种设备的网关平台,对工地中常用的施工设备进行数据融合,从扬尘的产生和雾炮机降尘两个角度进行量化分析,并构建了扬尘预测模型。该模型根据施工现场和环境情况对扬尘扩散进行预测,通过预测结果控制雾炮机的工作时长,使得扬尘在扩散之前就得到有效控制。在核电现场实验中,使用该算法的雾炮机在降尘效果基本不变的前提下,与未使用算法时相比平均节约60% 左右的水电资源,具有很好的节能环保效果。
参考文献
-
[1]王峦. 城市建筑施工扬尘污染的现状及治理对策[J]. 四川水泥, 2022(6): 157-158.
-
[2]毕丽克孜·阿布都艾尼. 乌鲁木齐市扬尘污染防治措施研究[J]. 皮革制作与环保科技, 2022, 3(9): 139-141.
-
[3]陈安凯. 建筑工地扬尘污染评价及防治[J]. 工程与建设, 2021, 35(3): 625-626.
-
[4]谢海花, 马晓飞, 赵月平, 等. 基于回归预测的公路施工扬尘扩散预测[J]. 公路, 2021, 66(5): 89-92.
-
[5]刘伟, 袁紫婷, 胡伟成, 等. 施工扬尘空间扩散特性的模型分析与分级管控措施[J]. 环境工程学报, 2021, 15(6): 1976-1987.
-
[6]周红, 沈希文, 赵颖慧. 施工扬尘扩散模拟与工人健康损害定量评估研究[J]. 安全与环境学报, 2023, 23(8): 2750-2758.
-
[7]韩桂波, 詹水芬, 张晓春, 等. 煤炭粉尘颗粒起动风速影响因素及数学模型[J]. 煤炭学报, 2009, 34(10): 1359-1363.
-
[8]程明杨, 吴春雷, 林玉鹏. 深圳市建设工程施工工地扬尘污染特征分析[J]. 技术与市场, 2017, 24(4): 163-164.
-
[9]陈景序, 马恒, 荆德吉. 受限空间沉积粉尘二次飞扬特征及数值分析[J]. 辽宁工程技术大学学报(自然科学版), 2019, 38(2): 130-135.
-
[10]李昊. 道路工程施工扬尘扩散规律及防控措施研究[D]. 郑州: 郑州大学, 2022.
-
[11]许汉萍, 幸福堂, 梅丹, 等. 关于降尘车喷雾降尘覆盖面积优化仿真研究[J]. 计算机仿真, 2019, 36(4): 142-145.
-
[12]范武波, 陈军辉, 唐斌雁, 等. 成都市施工扬尘排放特征研究[J]. 中国环境科学, 2020, 40(9): 3767-3775.


